位移传感器旋转编码器,感应同步器,光栅尺,磁栅尺,电子尺的精度排列先后,它们输出的是模拟信号还是数字信号
 okokok10012022-10-04 11:39:541条回答
okokok10012022-10-04 11:39:541条回答
已提交,审核后显示!提交回复
共1条回复
 zhanggengyun 共回答了16个问题
zhanggengyun 共回答了16个问题 |采纳率87.5%- 旋转编码器,光栅尺,磁栅尺通常都是数字信号输出,常规产品按此顺序应该分别是一组机械开关、光电开关或磁开关(或霍尔开关)以一定规律组合,从而得到绝对编码的开关量信号或脉冲信号,基本原理应该一致,只是采取的手段不同.
而感应同步器和电子尺通常输出的是模拟信号,都是采用可变电阻的分压原理.
但是很多产品都带有二次仪表或信号经过处理后再输出,因此具体到某产品输出是数字量还是模拟量就要看实际情况了.RS485或RS232输出肯定是数字量,但其前端是什么信号就不一定了.
关于精度的话不好排序,任何类型的产品都有高精度或低精度,要看具体使用情况来选择. - 1年前
相关推荐
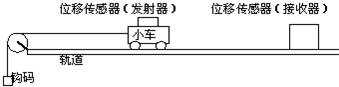
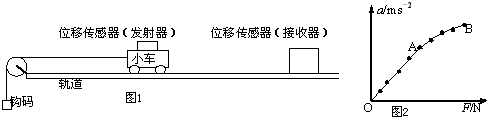
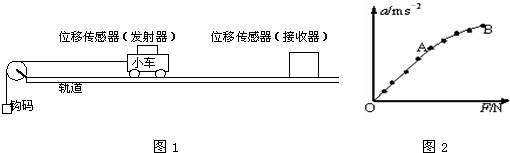
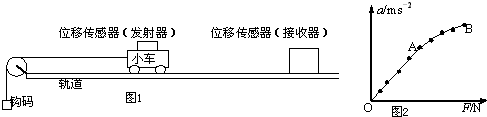
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。

小题1:在该实验中必须采用控制变量法,应保持___________不变,用钩码所受的重力作为_________,用DIS测小车的加速度。
小题2:改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出 a - F 关系图线(如图所示)。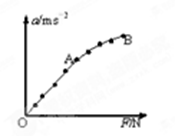
①分析此图线的OA段可得出的实验结论是___________________ __。
②(单选题)此图线的AB段明显偏离直线,造成此误差的主要原因是( )A.小车与轨道之间存在摩擦 B.导轨保持了水平状态 C.所挂钩码的总质量太大 D.所用小车的质量太大 saan20001年前1 -
xxx1978 共回答了14个问题
|采纳率92.9%小题1:小车的质量 小车的合力
小题2:1小车的加速度与其合力成正比
2C……2分
分析:①探究加速度与力的关系,应控制小车的质量保持不变;平衡摩擦力后用钩码的重力作为小车受到的合力;
②控制实验所控制的变量,分析图象,根据图象特点得出实验结论;根据实验注意事项分析图象偏离直线的原因.
①探究加速度与力的关系,应保持小车的质量不变,用钩码所受的重力作为小车所受的合力.
②由图象OA段可知,a与F成正比,即:在小车质量一定时,加速度a与小车受到的合力F成正比;
以小车与钩码组成的系统为研究对象,系统所受的合外力等于钩码的重力m 钩码 g,
由牛顿第二定律得:m 钩码 g=(m 小车 +m 钩码 )a,小车的加速度a= m 钩码 /(m 小车 +m 钩码 )g,
小车受到的拉力F=m 小车 a= m 小车 m 钩码 /(m 小车 +m 钩码 )g,当m 钩码 <<m 小车 时,
可以认为小车受到的合力等于钩码的重力,如果钩码的质量太大,
则小车受到的合力小于钩码的重力,实验误差较大,a-F图象偏离直线,故C正确.
故答案为:①小车的质量;合力;②小车的质量一定,加速a与合力F成正比;C.1年前查看全部
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制变量法
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持___________不变,用钩码所受的重力作为小车所受外力,用DIS测小车的加速度。
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出 a - F 关系图线(如图所示)。
①分析此图线的OA段可得出的实验结论是_________________________________;
②此图线的AB段明显偏离直线,造成此误差的主要原因是___________。
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大 红蝶飞飞1年前1
红蝶飞飞1年前1 -
yzh56 共回答了19个问题
|采纳率89.5%(1)小车的总质量
(2)①在质量不变的条件下,加速度与外力成正比;②C1年前查看全部
- (2010•厦门二模)研究性学习小组在探究某球竖直向上运动过程中,通过位移传感器测得该球运动的高度与时间关系(从抛出时开
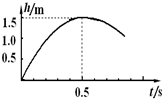 (2010•厦门二模)研究性学习小组在探究某球竖直向上运动过程中,通过位移传感器测得该球运动的高度与时间关系(从抛出时开始计时)如图所示.设运动过程所受的空气阻力大小保持不变,为简化计算g取10m/s2,求:
(2010•厦门二模)研究性学习小组在探究某球竖直向上运动过程中,通过位移传感器测得该球运动的高度与时间关系(从抛出时开始计时)如图所示.设运动过程所受的空气阻力大小保持不变,为简化计算g取10m/s2,求:
(1)小球抛出的初速度.
(2)小球下落的加速度.
(3)从最高处落回到抛出点的时间.wy43101年前1 -
天上第一神童 共回答了24个问题
|采纳率91.7%解题思路:(1)竖直向上抛出,向上做匀减速直线运动,结合上升的最大高度和时间,通过平均速度的公式求出小球抛出的初速度.
(2)根据速度时间公式求出上升过程中的加速度,从而根据牛顿第二定律求出上升过程中所受的阻力,再结合牛顿第二定律求出下落时的加速度.
(3)根据位移时间公式求出从最高处落回到抛出点的时间.(1)由图可知上升0.5秒时到最大高度为1.5米处,上升过程有:
h=
V0+Vt
2t1
Vt=0代入得:V0=6m/s
(2)上升加速度a1,由Vt=V0-a1t1得:a1=12 m/s2
上升过程由牛二定律:mg+f=ma1
同理,下落过程:mg-f=ma2
代入数据得:a2=8m/s2
(3)由:h=
1
2a2
t22
代入数据解得下落时间 t2=
2h
a2=
6
4s≈0.61s.
答:(1)小球抛出的初速度为6m/s.
(2)小球下落的加速度为8m/s2.
(3)从最高处落回到抛出点的时间为0.61s.点评:
本题考点: 牛顿第二定律;匀变速直线运动的位移与时间的关系.
考点点评: 解决本题的关键掌握匀变速直线运动的公式和推论以及牛顿第二定律,知道加速度是联系力学和运动学的桥梁.1年前查看全部
- 简述用位移传感器测定一辆小车沿轨道下滑时的加速度的主要实验布奏和重要的注意事项
风雨园少主1年前1
-
掌中雪666 共回答了19个问题
|采纳率84.2%很简单的实验啊!
1、在导轨上安装好位移传感器;2、调节导轨的倾斜度以平衡摩擦力;3、运行传感器工作系统,释放小车,传感器会自动记录数据;4、完成后设置一下系统的求加速度选项,加速度就出来了!注意事项:位移传感器的作用距离是有限制的,小车与它的初始距离不能太近,至少保持20CM.1年前查看全部
- 数字型线性位移传感器测量范围数字型线性位移传感器的测量范围为50-4000mm,数据长度为24bit,是50mm对于的数
数字型线性位移传感器测量范围
数字型线性位移传感器的测量范围为50-4000mm,数据长度为24bit,是50mm对于的数据为0,4000mm对于的数据为2的24次方吗?neill653141年前1 -
埃米 共回答了17个问题
|采纳率88.2%24bit是指2的24次方,等于16777216.
假设传感器的设计者把16777216等分全部用于50~4000mm,并且50mm对应2^24的零位,则这只能说明在50~4000mm范围内,传感器的最大理论分辨率(不是精度!)为(4000-50)/16777216=0.00023mm.
但是考虑到实际编码方法、电路和信号的实际情况,分辨率不可能做到这样.
你关注的重点,应该是50~4000mm的量程是否足额?在此量程内测量的精度是多少?
对于厂家声称的产品的某些指标,用户有时很难理解它准确含义.商业性的意义更多.1年前查看全部
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制变量法
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持___________不变,用钩码所受的重力作为___________,用DIS测小车的加速度。
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示)。
①分析此图线的OA段可得出的实验结论是______________________;
②此图线的AB段明显偏离直线,造成此误差的主要原因是___________。
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大杰先生1年前1 -
桃花俏 共回答了22个问题
|采纳率81.8%(1)小车的总质量,小车所受外力
(2)①在质量不变的条件下,加速度与外力成正比;②C1年前查看全部
- 物理小组用自己设计的位移传感器来探究滑块的简谐运动,其工作原理如图(a)所示,滑块M在导轨上平移时,带动滑动变阻器的滑片
物理小组用自己设计的位移传感器来探究滑块的简谐运动,其工作原理如图(a)所示,滑块M在导轨上平移时,带动滑动变阻器的滑片P一起平移,利用示波器获得的U—t图像可以反映滑块M的位移x的变化情况。已知电源电动势为E,内阻不计,滑动变阻器的滑片从A端滑到B端的总长为L,滑块位于O点时滑片P恰与AB的中点接触。滑块M以O为平衡位置做简谐运动(取向右为正方向),振幅为  。若U随时间t的变化关系如图(b)所示,则在图示0—t 1 时间内,下列说法正确的是
。若U随时间t的变化关系如图(b)所示,则在图示0—t 1 时间内,下列说法正确的是 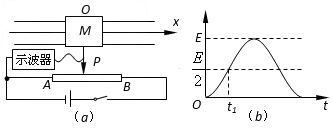 [ ]
[ ]A.滑块M的速度为正方向且不断增大
B.滑块M的速度为负方向且不断减小
C.滑块M的加速度为正方向且不断增大
D.滑块M的加速度为负方向且不断减小zyy7119231年前1 -
芝麻L33 共回答了12个问题
|采纳率83.3%A1年前查看全部
- (2014•保定一模)某位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P,通过理想电压表显
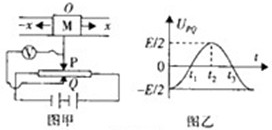 (2014•保定一模)某位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P,通过理想电压表显示的数据来反映物体的位移x.设定电源电动势为E,内阻不计,滑动变阻器的长度为L,物体经过O点时P恰好位于滑动变阻器的中点,此时电压表示数显示为0,若电压表的示数UPQ随时间t的变化关系如图乙(余弦图象)所示,则下列说法正确的是( )
(2014•保定一模)某位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P,通过理想电压表显示的数据来反映物体的位移x.设定电源电动势为E,内阻不计,滑动变阻器的长度为L,物体经过O点时P恰好位于滑动变阻器的中点,此时电压表示数显示为0,若电压表的示数UPQ随时间t的变化关系如图乙(余弦图象)所示,则下列说法正确的是( )
A.在t1时刻M恰好运动到O位置
B.物体M以O点为中心做往复运动
C.在t1到t2时间段内,M的速度先增大后减小
D.在t2时刻物体M在最右端且速度为0avrils1年前1 -
猫耳小包 共回答了25个问题
|采纳率100%解题思路:由U-t图,读出0、t1、t2时刻的电压,确定物体的位置.根据电压的变化情况,判断物体的运动方向,结合简谐运动的特点:加速度方向始终指向平衡,就能分析物体的速度和加速度的方向及大小变化.在t1时刻,电压为0,且正在增加,故物体在平衡位置,此时速度最大,物体具有正方向的最大速度,此后速度减小;当在t2时刻电压最大时,速度减小为零;此后反向加速,t3时刻又回到平衡位置,如此往复,所以物体M以O点为中心做往复运动.故ABD正确、C错误.
故选:ABD.点评:
本题考点: 传感器在生产、生活中的应用.
考点点评: 本题是力电综合题,既要研究电压如何变化,又要研究简谐运动的特点,更要抓住它们之间的联系.本题通过位移将力电联系起来,这是解决本题的关键.1年前查看全部
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制变量法
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持_________不变,用钩码所受的重力作为_________,用DIS测小车的加速度。
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示)。
①分析此图线的OA段可得出的实验结论是__________________。
②此图线的AB段明显偏离直线,造成此误差的主要原因是[ ]A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大温暖的秋天1年前1 -
茉乔 共回答了16个问题
|采纳率87.5%(1)小车的总质量,小车所受外力
(2)①在质量不变的条件下,加速度与外力成正比;②C1年前查看全部
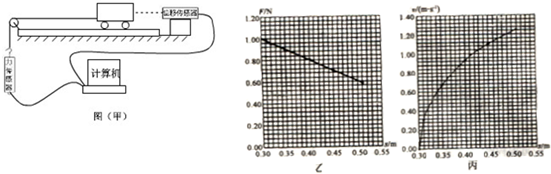
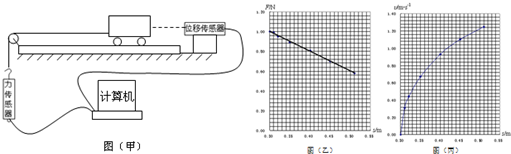
- 某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图甲所示,他们用力传感器通过定滑轮直接拉固定在
某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图甲所示,他们用力传感器通过定滑轮直接拉固定在小车上的细绳,测出拉力F;用位移传感器测出小车的位移s和瞬时速度v.已知小车质量为200g.
①某次实验得出拉力F随位移s变化规律如图乙所示,速度v随位移s变化规律如图丙所示.利用所得的F-s图象,求出s=0.30m到0.52m过程中变力F做功W=______J,此过程动能的变化△Ek=______J(保留2位有效数字)
②指出下列情况可减小实验误差的操作是______ (填选项前的字母,可能不止一个选项).
A.使拉力F要远小于小车的重力B.实验时要先平衡摩擦力C.要使细绳与滑板表面平行.爱昵吧1年前1 -
lajiljj 共回答了24个问题
|采纳率83.3%解题思路:①根据F-s图象s=0.30m和0.52m所对应的力的大小,由于力是均匀变化的,根据
求出F的平均值,然后即可求出功的大小;在速度v随位移s变化图象上求出s=0.30m时的速度大小和s=0.52m时的速度大小,即可求出动能的变化;F1+F2 2
②当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力.①根据F-s图象图象可知,当s1=0.30m时,F1=1.00N,s2=0.52m时,F2=0.56N,
因此:W=
F1+F2
2×(s2−s1)=0.172J,
速度v随位移s变化图象可知:
s1=0.30m,v1=0,s2=0.52m时,v2=1.24m/s
△Ek=
1
2m
v22−
1
2m
v21=0.15J
故答案为:0.17,0.15.
②该实验中不是利用悬挂的重物的重力表示绳子的拉力,而是直接测量出绳子的拉力,因此不需要使拉力F要远小于小车的重力,故A错误;
当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力,故BC正确;
故选BC.点评:
本题考点: 探究功与速度变化的关系.
考点点评: 该实验在原来的基础上有所改进和创新,只要明确了其实验原理,正确应用基本物理知识即可正确解答.1年前查看全部
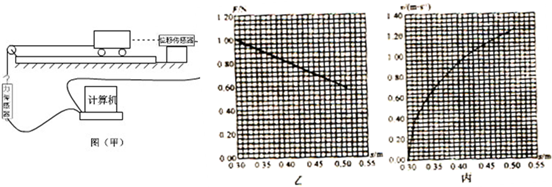
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和质量的关系”的实验装置.
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和质量的关系”的实验装置. 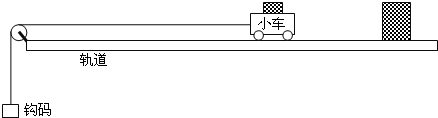
(1)在该实验中采用控制变量法,应保持______不变,用DIS测小车的加速度,小车上安装的是位移传感器的______部分.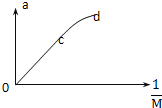
(2)(单选题)改变小车的总质量M,多次重复测量.在某次实验中根据测得的多组数据可画出a-QUOTE 关系图线如图所示.此图线的cd段明显偏离直线,造成此误差的主要原因是______
(A)小车与轨道之间的摩擦力越来越大
(B)导轨处于水平状态
(C)所挂钩码的质量太小
(D)所用小车的总质量太小.better0981年前1 -
petcat 共回答了18个问题
|采纳率77.8%(1)在该实验中采用控制变量法,应保持钩码的重力 不变,用DIS测小车的加速度,小车上安装的是位移传感器的发射器部分.
(2)本实验是在小车质量远大于钩码的质量时,用钩码的重力代替绳子的拉力F,随着小车M减小,因此小车质量不再满足远大于钩码的质量,加速度不可能一直均匀增大,加速度的增大幅度将逐渐减小.
故选D.
故答案为:(1)钩码的重力,发射器(2)D1年前查看全部
- 如图甲为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
如图甲为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中我们以小车为研究对象,采用控制变量法,来研究小车的加速度与合力的关系,应保持小车的总质量不变,用______作为小车所受外力,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图乙所示).
①分析此图线的OA段可得出的实验结论是______.
②此图线的AB段明显偏离直线,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦B.导轨保持了水平状态 C.所挂钩码的总质量太大 D.所用小车的质量太大.醉卧世外桃源1年前1 -
不曾对你说抱歉 共回答了21个问题
|采纳率71.4%(1)研究小车的加速度与合力的关系,应保持小车的总质量不变,用钩码所受的重力作为小车所受的外力.
(2)①OA段是过原点的直线,知在质量不变的条件下,加速度与外力成正比.
②设小车的质量为M,钩码的质量为m,由实验原理得:
mg=Ma
得a=[mg/M]=[F/M],而实际上a′=[mg/M+m],可见AB段明显偏离直线是由于没有满足M>>m造成的.故C正确.
故答案为;(1)钩码所受的重力;
(2)①在质量不变的条件下,加速度与外力成正比;②C.1年前查看全部
- 位移传感器的探测距离有多远
燃烧的血3301年前1
-
海鸥y 共回答了15个问题
|采纳率100%位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器.电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的.1年前查看全部
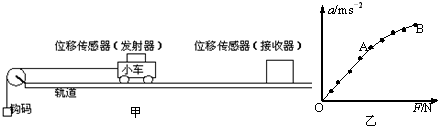
- (Ⅰ)如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(Ⅰ)如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用控制变量法,应保持______不变,用钩码所受的重力作为______,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示).
①分析此图线的OA段可得出的实验结论是______.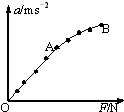
②(单选题)此图线的AB段明显偏离直线,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦B.导轨保持了水平状态
C.所挂钩码的总质量太大D.所用小车的质量太大
(Ⅱ)实验室新进了一批低电阻的电磁螺线管,课外活动小组的同学设计了一个试验来测算螺线管的电阻.他们选择了多用电表、电流表、电压表、开关、滑动变阻器、导线和学生电源等.
(1)他们使用多用电表粗测金属丝的电阻,操作过程分以下三个步骤:
①将红表笔插入多用电表的______插孔(正、负)、黑表笔插入多用电表的插孔(正、负);选择电阻档“×1”;
②______
③把红黑表笔分别与螺线管金属丝的两端相接,如图所示,读数为______Ω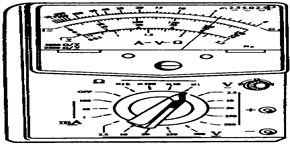
(2)根据多用电表示数,为了减少实验误差,并在实验中获得较大的电压调节范围,应从下图中的A、B、C、D四个电路中选择______电路来测量金属丝电阻;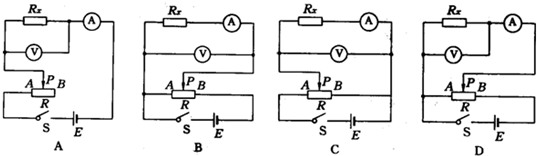
(3)他们正确连接电路,接通电源后,调节滑动变阻器,发现电流始终无示数.请设计一种方案,利用多用电表检查电路故障并写出判断依据.(只需写出简要步骤)
①______
②______.可以清心SWB1年前1 -
大漠孤烟hg 共回答了10个问题
|采纳率100%解题思路:I、解决实验问题首先要掌握该实验原理,了解实验的操作步骤和数据处理以及注意事项;该实验是探究加速度与力的关系,我们采用控制变量法 进行研究;根据图象得出变量之间的关系,知道钩码所受的重力作为小车所受外力的条件.
II、使用多用电表欧姆档测电阻时,要先估测待测电阻阻值,然后选择合适倍率,对欧姆表进行欧姆调零,最后用欧姆表测电阻,欧姆表读数是指针示数乘以倍率;待测电阻丝阻值很小,应该使用电流表的外接法;为了测出多组实验数据,且从零开始测量,滑动变阻器应使用分压接法,据此分析电路图,找出符合要求的实验电路;电流表无示数说明电路中有断路,电压表有示数说明电压表与电源连接的电路中无断路.I、(1)因为要探索“加速度和力的关系”所以应保持小车的总质量不变,钩码所受的重力作为小车所受外力;
故答案为:小车的总质量,小车所受外力.
(2)①由于OA段a-F关系为一倾斜的直线,所以在质量不变的条件下,加速度与外力成正比
②由实验原理:mg=Ma,得:a=
mg
M=
F
M
而实际上是:a′=
mg
(M+m),可见AB段明显偏离直线是由于没有满足M>>m造成的,故ABD错误,C正确.
故答案为:①在质量不变的条件下,加速度与外力成正比,②C,
II、Ⅱ、(1)①红表笔和电表的“正”插孔相连,黑表笔和电表的“负”插孔相连.
②对欧姆表进行欧姆调零,具体操作是:将红黑表笔对接,调节欧姆调零电阻,使指针指在最右端零刻度线处;
③由图2(a)所示多用电表可知,欧姆表示数是4×1Ω=4Ω.
故答案为:①正,②将红、黑表笔短接,调整调零旋钮调零;③4.
(2)为减小误差,实验多次测量,根据题目要求可知,实验时应采用电流表的外接法,滑动变阻器应使用分压接法,由图2所是电路图可知,符合要求的实验电路是D.
故选D.
(3)①使用多用电表的电压档位,接通电源,逐个测量各元件、导线上的电压,若电压等于电源电压,说明该元件或导线断路故障.
②使用多用电表的电阻档位,断开电路或拆下元件、导线,逐个测量各元件、导线上的电阻,若电阻为无穷大,说明该元件或导线断路故障.
故答案为:①使用多用电表的电压档位,接通电源,逐个测量各元件、导线上的电压,若电压等于电源电压,说明该元件或导线断路故障;
②使用多用电表的电阻档位,断开电路或拆下元件、导线,逐个测量各元件、导线上的电阻,若电阻为无穷大,说明该元件或导线断路故障.点评:
本题考点: 伏安法测电阻;探究加速度与物体质量、物体受力的关系.
考点点评: I、清楚实验的研究方法和实验中物理量的测量;当钩码的质量远小于小车的总质量时,钩码所受的重力才能作为小车所受外力.
II、本实验考查了实验操作、欧姆表读数等问题,熟练掌握基础知识,熟练应用欧姆定律、电阻定律即可正确解题.1年前查看全部
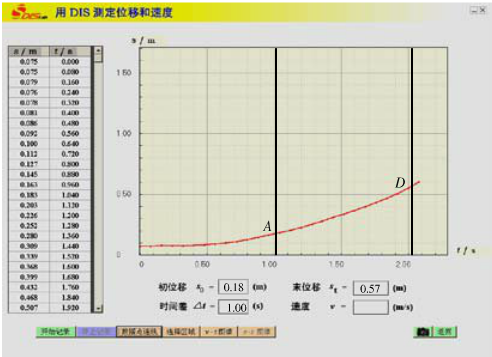
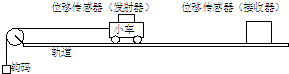
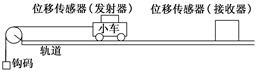
- (2012•长宁区二模)在利用分体式位移传感器测变速直线运动平均速度的实验中,实验操作时:
(2012•长宁区二模)在利用分体式位移传感器测变速直线运动平均速度的实验中,实验操作时:
(1)位移传感器的接收器部分应该
(A)固定在支架上且与数据采集器相连
(B)固定在支架上且与计算机相连
(C)固定在运动物体上且与数据采集器相连
(D)固定在运动物体上且与计算机相连
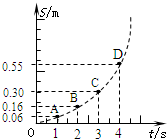
(2)点击“选择区域”,取A、D两点,得到实验界面如图所示,则物体在A、D过程中的平均速度为______m/s.oldwiallian1年前1 -
simple_gd 共回答了17个问题
|采纳率94.1%解题思路:(1)由于发射器固定在小车上,故接收器应该固定在轨道上.
(2)平均速度等于一段时间内的位移比上时间.(1)由于发射器固定在小车上,故接收器应该固定在支架上且与数据采集器相连.
故选A.
(2)初时刻位移x0=0.18m,末时刻位移xt=0.57m
时间差△t=1.00s
所以A、D过程中的平均速度为v=[△x/△t]=0.39m/s
故答案为:(1)A(2)0.39点评:
本题考点: 探究小车速度随时间变化的规律.
考点点评: 本题关键要明确“分体式位移传感器测变速直线运动平均速度”实验中实验器材的用法,由于目前很多学校还不具备条件,不少同学不能亲自做这个实验,可以多看看课本.1年前查看全部
- 已知某一位移传感器的测量范围为0~30mm,静态测量时,输入值与输出值的关系如表1.1所示.试求该传感器的线性度和灵敏度
孤独de音符1年前1
-
清清qingqing 共回答了15个问题
|采纳率93.3%你输入值单位是mm,输出值是mV,首先应该是先将输出值也转换为mm才能计算线性吧.线性通常指的是一个比例关系,线性误差我们的计算方式是(实测值-理想值)/总量程.
灵敏度是最小位移量所对应的读值1年前查看全部
- 利用位移传感器与计算机结合,可以自动作出物体运动的图象,某同学在一次实验中得到的运动小车的v-t图象如图所示,由此图象可
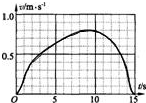 利用位移传感器与计算机结合,可以自动作出物体运动的图象,某同学在一次实验中得到的运动小车的v-t图象如图所示,由此图象可以知道 ( )
利用位移传感器与计算机结合,可以自动作出物体运动的图象,某同学在一次实验中得到的运动小车的v-t图象如图所示,由此图象可以知道 ( )
A.小车做曲线运动
B.小车先做加速运动,后做减速运动
C.15秒末小车回到起点
D.小车的最大位移是0.8mnupeez1年前1 -
5无名 共回答了21个问题
|采纳率95.2%解题思路:根据速度图象的斜率等于速度分析小车的运动性质.由图直接读出小车速度的最大值.根据速度图线与坐标轴所围“面积”等于位移,估算小车的最大位移.小车做直线运动.A、根据速度时间图线知,小车先做加速运动,后做减速运动,是变速直线运动,不是曲线运动.故A错误,B正确.
C、图线与时间轴围成的面积表示位移,15s末的位移不为零,图中每一小格为“面积”为0.1,面积超过方格一半算一个,不足半格舍去,总共有86格,所以总“面积”为8.6m,小车的最大位移是为8.6m.故C、D错误.
故选B.点评:
本题考点: 匀变速直线运动的图像.
考点点评: 本题根据斜率分析加速度的变化并不难,难点在于对图线“面积”的估算,采用“四舍五入”近似的方法计算.1年前查看全部
- 某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”。图甲所示,他们用力传感器通过定滑轮直接拉固定在
某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”。图甲所示,他们用力传感器通过定滑轮直接拉固定在小车上的细绳,测出拉力F;用位移传感器测出小车的位移s和瞬时速度v。已知小车质量为200g。
小题1:某次实验得出拉力F随位移s变化规律如图乙所示,速度v随位移s变化规律如图丙所示。利用所得的F-s图象,求出s=0.30m到0.52m过程中变力F做功W= J,此过程动能的变化△E k = J(保留2位有效数字)
小题2:指出下列情况可减小实验误差的操作是 (填选项前的字母,可能不止一个选项)。
A.使拉力F要远小于小车的重力 B.实验时要先平衡摩擦力 C.要使细绳与滑板表面平行韦阿七1年前0 -
共回答了个问题
|采纳率
- (2014•漳州模拟)如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(2014•漳州模拟)如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用控制变量法,应保持______不变,用钩码所受的重力作为______,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线如图2所示.
①分析此图2线的OA段可得出的实验结论是______.
②(单选题)此图2线的AB段明显偏离直线,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大.闲逛的小考拉1年前1 -
麻辣戈壁 共回答了19个问题
|采纳率89.5%(1)探究加速度与力的关系,应保持小车的质量不变,用钩码所受的重力作为小车所受的合力.(2)由图象OA段可知,a与F成正比,即:在小车质量一定时,加速度a与小车受到的合力F成正比;以小车与钩码组成的系统为研究...1年前查看全部
- (多选题)如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.下列说法中正确的是____
 (多选题)如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.下列说法中正确的是______.
(多选题)如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.下列说法中正确的是______.
(A)小车与轨道间的摩擦力要小
(B)所挂钩码的总质量应远大于小车的总质量
(C)改变所挂钩码的数量,多次重复测量取平均值
(D)用一个力传感器替代钩码来测量小车受到的拉力,该实验a-F图线的斜率将变大.ilylxt20051年前1 -
麦七论 共回答了19个问题
|采纳率73.7%解题思路:解决实验问题首先要掌握该实验原理,该实验是探究加速度与力的关系,采用控制变量法进行研究.平衡摩擦力后用钩码的重力作为小车受到的合力;根据牛顿第二定律,得出图线斜率表示的物理意义,从而判断图线斜率的意义.A、该实验中近似认为细线的拉力等于小车的合力,所以小车与轨道间的摩擦力要小.故A正确;
B、以小车与钩码组成的系统为研究对象,系统所受的合外力等于钩码的重力m钩码g,
由牛顿第二定律得:mg=(M+m)a,
小车的加速度a=[mg/M+m],
小车受到的拉力F=Ma=[mg
1+
m/M]g,当m<<M时,可以认为小车受到的合力等于钩码的重力,故B错误;
C、改变所挂钩码的数量,小车的加速度发生改变,应该改变所挂钩码的数量,多次重复测量,测出对应的物理量数据,不可以取平均值.故C错误;
D、用一个力传感器替代钩码来测量小车受到的拉力,
根据牛顿第二定律得,a=[F/m],知图线的斜率表示质量的倒数.挂重物时,a=[mg/M+m],图线的斜率表示系统质量的倒数,
用力传感器时,加速度a=[F/M].图线的斜率表示小车质量M的倒数,可知图线的斜率变大.故D正确;
故选:AD.点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 本题考查了控制变量法的应用、实验数据处理、实验误差分析,实验误差分析是本题的难点;应知道当砝码质量远小于小车质量时,可以认为小车受到的拉力等于钩码重力.1年前查看全部
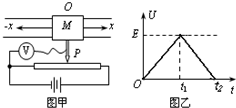
- 利用如图1所示的装置测量滑块和滑板间的动摩擦因数.将质量为M的滑块A放在倾斜滑板B上,C为位移传感器,它能将滑块A到传感
利用如图1所示的装置测量滑块和滑板间的动摩擦因数.将质量为M的滑块A放在倾斜滑板B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示出滑块A的速度--时间(v-t)图象.先给滑块A一个沿滑板B向上的初速度,得到的v-t如图2所示,求:
(1)滑块A上滑时加速度的大小;
(2)滑块与滑板之间的动摩擦因数(取重力加速度g=10m/s 2 ).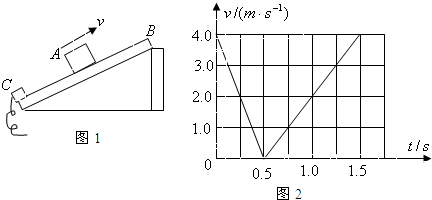 柳梢桂月1年前1
柳梢桂月1年前1 -
2073341 共回答了12个问题
|采纳率75%(1)根据a=
△v
△t 得;
滑块A上滑时加速度的大小为 a 1 =|
0-4
0.5 |m/ s 2 =8.0m/ s 2
(2)A下滑时的加速度 a 2 =
4.0
1.5-0.5 m/ s 2 =4.0m/ s 2
由牛顿第二定律
A上滑时:mgsinθ+μmgcosθ=ma 1
A下滑时:mgsinθ-μmgcosθ=ma 2
解得:μ=0.25
答:(1)滑块A上滑时加速度的大小为8.0m/s 2 ;
(2)滑块与滑板之间的动摩擦因数为0.251年前查看全部
- 某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图甲所示,他们用力传感器通过定滑轮直接拉固定在
某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图甲所示,他们用力传感器通过定滑轮直接拉固定在小车上的细绳,测出拉力F;用位移传感器测出小车的位移s和瞬时速度v.已知小车质量为200g.
①某次实验得出拉力F随位移s变化规律如图乙所示,速度v随位移s变化规律如图丙所示.利用所得的F-s图象,求出s=0.30m到0.52m过程中变力F做功W=______J,此过程动能的变化△Ek=______J(保留2位有效数字)
②指出下列情况可减小实验误差的操作是______(填选项前的字母,可能不止一个选项).
A.使拉力F要远小于小车的重力B.实验时要先平衡摩擦力C.要使细绳与滑板表面平行.野比一1年前1 -
chris198685 共回答了15个问题
|采纳率93.3%解题思路:①根据F-s图象s=0.30m和0.52m所对应的力的大小,由于力是均匀变化的,根据F1+F22求出F的平均值,然后即可求出功的大小;在速度v随位移s变化图象上求出s=0.30m时的速度大小和s=0.52m时的速度大小,即可求出动能的变化;②当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力.①根据F-s图象图象可知,当s1=0.30m时,F1=1.00N,s2=0.52m时,F2=0.56N,
因此:W=
F2+F1
2×(S2-S1)=0.18J,
速度v随位移s变化图象可知:
s1=0.30m,v1=0,s2=0.52m时,v2=1.24m/s
△EK=[1/2]m(v22-v12)=0.17J
②该实验中不是利用悬挂的重物的重力表示绳子的拉力,而是直接测量出绳子的拉力,因此不需要使拉力F要远小于小车的重力,故A错误;
当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力,故BC正确;
故选:BC.
故答案为:(1)0.18; 0.17; BC.点评:
本题考点: 探究功与速度变化的关系.
考点点评: 该实验在原来的基础上有所改进和创新,只要明确了其实验原理,正确应用基本物理知识即可正确解答.1年前查看全部
- 如图实所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制
如图实所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持________不变,用钩码所受的重力作为小车所受外力,用DIS测小车的加速度;
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示),分析此图线的OA段可得出的实验结论是_____________________________________;
(3)此图线的AB段明显偏离直线,造成此误差的主要原因是________。
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大aoo07051年前1 -
切西瓜大家吃 共回答了17个问题
|采纳率94.1%(1)小车的总质量(小车的质量)
(2)在质量不变的条件下,加速度与合外力成正比
(3)C1年前查看全部
- 某同学用位移传感器研究木块在斜面上的滑动情况,装置如图1.己知斜面倾角θ=37°.他使木块以初速度v0沿斜面上滑,并同时
某同学用位移传感器研究木块在斜面上的滑动情况,装置如图1.己知斜面倾角θ=37°.他使木块以初速度v0沿斜面上滑,并同时开始记录数据,绘得木块从开始上滑至最高点,然后又下滑回到出发处过程中的s-t图线如图2所示.图中曲线左侧起始端的坐标为(0,1.4),曲线最低点的坐标为(0.5,0.4).重力加速度g取10m/s2.sin37°=0.6,cos37°=0.8求:
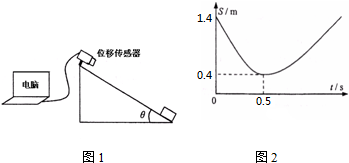
(1)木块上滑时的初速度v0和上滑过程中的加速度a1;
(2)木块与斜面间的动摩擦因数μ;
(3)木块滑回出发点时的速度vt.
shukyzhuang1年前3 -
mayilin 共回答了18个问题
|采纳率94.4%解题思路:(1)物体匀减速上滑,由图象得到末速度、位移和时间,然后根据位移时间关系公式和速度时间关系公式列式求解;
(2)对物体受力分析后,根据牛顿第二定律列式求解即可;
(3)先受力分析后得到下滑的加速度,然后根据速度位移公式列式求解末速度.(1)物体匀减速上滑,由图象得到:末速度v=0,位移x=1.4-0.4=1.0m,时间为t=0.6s;
根据位移时间公式,有x=v0t+
1
2at2;
根据速度时间公式,有v=v0+at;
联立解得:v0=4m/s,a=-8m/s2
(2)上滑过程,物体受重力支持力和滑动摩擦力,根据牛顿第二定律,有
-mgsin37°-μmgcos37°=ma
代入数据解得
μ=0.25
(3)木块下滑过程,根据牛顿第二定律,有
mgsin37°-μmgcos37°=ma′
代入数据解得
a′=4m/s2
物体匀加速下滑,根据速度位移公式,有
v2t=2a′x
解得
vt=
2a′x=
2×4×1=2
2m/s
答:(1)木块上滑时的初速度为4m/s,上滑过程中的加速度为-8m/s2;
(2)木块与斜面间的动摩擦因数为0.25;
(3)木块滑回出发点时的速度为2
2m/s.点评:
本题考点: 牛顿第二定律;匀变速直线运动的位移与时间的关系.
考点点评: 本题关键是根据图象得到物体上滑时的运动规律,求解出加速度和初速度;然后根据牛顿第二定律列式求解出摩擦力;最后再确定下滑时的运动情况.1年前查看全部
- 某同学利用如图(a)装置研究外力与加速度的关系.将力传感器和位移传感器的发射端安装在置于水平轨道的小车上,将细绳的一端系
某同学利用如图(a)装置研究外力与加速度的关系.将力传感器和位移传感器的发射端安装在置于水平轨道的小车上,将细绳的一端系在力传感器测量挂钩上,另一端绕过光滑定滑轮悬挂钩码.开始实验后,依次按照如下步骤操作:
①同时打开力传感器和位移传感器;
②释放小车;
③关闭传感器,根据计算机显示的F-t和v-t图象记录下小车在此次加速运动过程中绳子的拉力F和小车加速度a.
④改变钩码质量,重复上述步骤.
(1)某次释放小车后计算机显示的F-t和v-t图象如图(b).根据图象,此次操作应记录下的外力F大小为______N,加速度a为______m/s2.
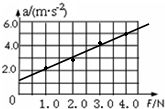
(2)根据上述实验器材和过程画出a-F图象的示意图如图(c),那么理论上图线斜率应等于______,图线不过原点的原因可能是______. gfaha1年前1
gfaha1年前1 -
魂游故里 共回答了15个问题
|采纳率93.3%解题思路:了解该实验装置,知道实验过程中小车的运动情况.
根据F-t,v-t图象求出F大小和a的大小.
由图象可以看出:图线不通过坐标原点,当F为某一值时,加速度为零,知平衡摩擦力不足.(1)根据v-t图象得到0.8s前小车是静止的,0.8s后小车做匀加速运动.
所以此次操作应记录下的外力F大小为0.82N,
根据v-t图象的斜率求出加速度a=[△v/△t]=1.6m/s2.
(2)根据a=[F/m]得理论上图线斜率应等于小车的质量倒数,
由图象可知:图线不通过坐标原点,F不为零时,加速度仍为零,知没有平衡摩擦力或平衡摩擦力不足.
故答案为:(1)0.82;1.6;
(2)小车的质量倒数,没有平衡摩擦力或平衡摩擦力不足.点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 通过作图法研究两个变量之间的关系是物理里常用的一种手段,只有直线图形可以清楚地说明两变量之间的关系.1年前查看全部
- 如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。实验操作中,用钩码所受的重力作为小车
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。实验操作中,用钩码所受的重力作为小车所受外力,用DIS系统测定小车的加速度。在保持小车总质量不变的情况下,改变所挂钩码的数量,多次重复测量,将数据输入计算机,得到如图所示的 a - F 关系图线。 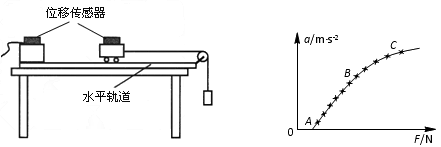
(1)分析发现图线在水平轴上有明显的截距( OA 不为零),这是因为:_____________。
(2)图线 AB 段基本是一条直线,而 BC 段明显偏离直线,造成此误差的主要原因是_______(选填字母代号)。
A.小车与轨道之间存在摩擦
B.钩码总质量过大
C.钩码总质量很小,远小于小车的总质量
D.释放小车之前就启动记录数据的程序idegz1年前1 -
tiy919139533 共回答了22个问题
|采纳率95.5%(1)未平衡摩擦力(平衡摩擦力不足)
(2)B1年前查看全部
- 传感器可将非电学量转化为电学量,起自动控制作用.如计算机鼠标中有位移传感器,电熨斗、电饭煲中有温度传感器,电视机、录像机
 传感器可将非电学量转化为电学量,起自动控制作用.如计算机鼠标中有位移传感器,电熨斗、电饭煲中有温度传感器,电视机、录像机、空调机中有光是传感器….演示位移传感器的工作原理如图所示,物体M在导轨上平移时,带动滑动变阻器的金属滑杆P,通过电压表显示的数据来反映物体位移的大小x0假设电压表是理想的,则下列说法正确的是( )
传感器可将非电学量转化为电学量,起自动控制作用.如计算机鼠标中有位移传感器,电熨斗、电饭煲中有温度传感器,电视机、录像机、空调机中有光是传感器….演示位移传感器的工作原理如图所示,物体M在导轨上平移时,带动滑动变阻器的金属滑杆P,通过电压表显示的数据来反映物体位移的大小x0假设电压表是理想的,则下列说法正确的是( )
A.物体M运动时,电源内的电流会发生变化
B.物体M运动时,电压表的示数会发生变化
C.物体M不动时,电路中没有电流
D.物体M不动时,电压表没有示数honh2391年前1 -
晚咬 共回答了13个问题
|采纳率100%解题思路:分析电路图可知电流表测通过电路的电流,电压表测电阻左侧部分的电压.当物体M移动时,接入电路的电阻不变,电阻上的滑片的移动,改变P点左侧部分的长度,
根据欧姆定律,电流不变,左侧电阻发生变化,则电压表示数发生变化,而电流表A示数不变.
故B正确,A、C、D错误.
故选B.点评:
本题考点: 欧姆定律的应用;滑动变阻器的使用.
考点点评: 本题考查了学生对欧姆定律的掌握和运用,本题关键是认识到滑动变阻器起不到变阻作用.1年前查看全部
- (1)某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图(甲)所示,他们用力传感器通过定滑轮直
(1)某课外活动小组利用力传感器和位移传感器进一步探究变力作用下的“动能定理”.图(甲)所示,他们用力传感器通过定滑轮直接拉固定在小车上的细绳,测出拉力F;用位移传感器测出小车的位移s和瞬时速度v.已知小车质量为200g.
①某次实验得出拉力F随位移s变化规律如图(乙)所示,速度v随位移s变化规律如图(丙)所示,数据如表格.利用所得的F-s图象,求出s=0.30m到0.52m过程中变力F做功W=______J,此过程动能的变化△EK=______J(保留2位有效数字).
②指出下列情况可减小实验误差的操作是______(填选项前的字母,可能不止一个选项)s/m F/N v/m′s-1 0.30 1.00 0.00 0.31 0.99 0.31 0.32 0.95 0.44 0.35 0.89 0.67 0.40 0.81 0.93 0.45 0.70 1.10 0.52 0.60 1.30
A.使拉力F要远小于小车的重力;
B.实验时要先平衡摩擦力;
C.要使细绳与滑板表面平行.
(2)某研究性学习小组在学完“测定金属丝电阻率”实验后,想利用下列器材测定自来水的电阻率:
①用毫米刻度尺测量如图(甲)所示的一段自来水管上两接线柱间距离为L;器材(代号) 规格 电流表(A1)
电流表(A2)
电压表(V1)
电压表(V2)
滑动变阻器(R)
直流电源(E)
开关(S)、导线若干
毫米刻度尺、游标卡尺
多用电表
一节两端可封住的绝缘PVC水管量程0~1mA,内阻约为50Ω
量程0~0.6A,内阻约为0.1Ω
量程0~3V,内阻约为10kΩ
量程0~15V,内阻约为50kΩ
阻值范围0~50Ω,允许最大电流0.5A
输出电压15V,内阻不计
②用游标卡尺测量水管内径为d,如图(乙)所示的读数为______mm;
③用多用电表测量两接线柱间装满自来水电阻约20kΩ;
④为提高实验结果的准确程度,电流表应选用______,电压表应选用______(以上均填器材代号);
⑤为了达到上述目的,某同学设计出正确的电路原理图并按电路图连接好实物图如(丙)图所示.接通电路后,当调节滑动变阻器的滑动片时,发现电压表、电流表有示数但几乎不变,请指出哪一根导线发生了断路?______(只要填写图中导线字母代号);
⑥若实验电路中电流表示数为I,电压表示数为U,可求得自来水的电阻率ρ=πd2U 4IL .(用以上测得的物理量符号表示)πd2U 4IL 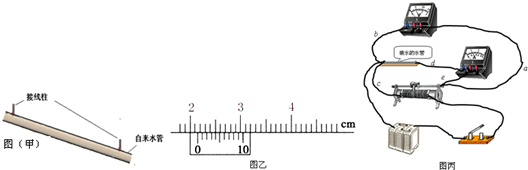 wswyxs1年前1
wswyxs1年前1 -
lanlanxingxing00 共回答了16个问题
|采纳率93.8%解题思路:(1)①根据F-s图象s=0.30m和0.52m所对应的力的大小,由于力是均匀变化的,根据F1+F22求出F的平均值,然后即可求出功的大小;在速度v随位移s变化图象上求出s=0.30m时的速度大小和s=0.52m时的速度大小,即可求出动能的变化;②当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力.(2)游标卡尺主尺与游标尺示数之和是游标卡尺的示数;根据电源电压选择电压表,根据电路最大电流选择电流表;根据电路故障现象分析电路故障原因;由欧姆定律与电阻定律分析答题.(1)①根据F-s图象图象可知,当s1=0.30m时,F1=1.00N,s2=0.52m时,F2=0.56N,
因此:W=
F1+F2
2×(s2-s1)=0.172J,
速度v随位移s变化图象可知:
s1=0.30m,v1=0,s2=0.52m时,v2=1.24m/s
△Ek=[1/2]mv22-[1/2]mv12=0.15J
②该实验中不是利用悬挂的重物的重力表示绳子的拉力,而是直接测量出绳子的拉力,因此不需要使拉力F要远小于小车的重力,故A错误;
当平衡了摩擦力和细绳与滑板表面平行时,绳子上的拉力才等于小车所受合外力,故BC正确;故选BC.
(2)②由图象游标卡尺可知,游标卡尺读数为d=21mm+4×0.1mm=21.4mm;
④电路中最大电流Im=[E/R]=[15/20]mA=0.75mA,电流表应选A1,电源电动势为15V,电压表选V2;
⑤因滑动变阻器采用的是分压式接法,故若电压表、电流表有示数但几乎不变说明导线C断路.
⑥根据欧姆定律R=[U/I]及电阻定律R=[ρL
π(
d/2)2],解得:ρ=
πd2U
4IL.
故答案为:(1)①0.18;0.17;②B、C;(2)②21.4; ④A1,V2;⑤c;⑥
πd2U
4IL.点评:
本题考点: 探究功与速度变化的关系.
考点点评: (1)该实验在原来的基础上有所改进和创新,只要明确了其实验原理,正确应用基本物理知识即可正确解答.(2)游标卡尺主尺与游标尺示数之和是游标卡尺示数,游标卡尺不需要估读.1年前查看全部
- 如图所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制变
如图所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持_______不变,用钩码所受的重力作为________,用DIS测小车的加速度。
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出a-F关系图线,如图所示。
①分析此图线的OA段可得出的实验结论是___________________。
②此图线的AB段明显偏离直线,造成此误差的主要原因是____________。
A.小车与轨道之间存在摩擦
B.轨道保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大ytxwh1年前1 -
红色猪cc 共回答了16个问题
|采纳率75%(1)小车的总质量(或小车的质量);小车所受合力
(2)①在质量不变的条件下,加速度与合力成正比;②C1年前查看全部
- (2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、
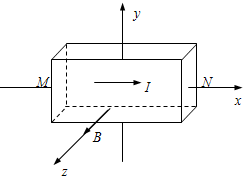
 (2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )
(2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )
A.磁感应强度B越大,上、下表面的电势差U越大
B.霍尔元件运动的速度越大,上、下表面的电势差越大
C.若图中霍尔元件是电子导电,则下板电势高
D.电流I取值越大,上、下表面的电势差U越小风中舞云里游1年前1 -
草色琉璃 共回答了21个问题
|采纳率95.2%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.C、电流向右、磁场向外,根据左手定则,安培力向下;电流是电子的定向移动形成的,故洛伦兹力也向下;故下极板聚集负电荷,上极板带正电荷,故下极板电势较低;故C错误;
A、B、D、设上下表面高度差为h,厚度为d,电子最终达到平衡,有:
evB=e[U/h]
则:U=vBh
电流的微观表达式:
I=nevS=nevhd
则:v=[I/nehd],代入得:
U=[I/nehd]Bh=[BI/ned]∝[BI/d]
磁感应强度B越大,上、下表面的电势差U越大,故A正确;
上、下表面的电势差与速度无关,故B错误;
D、电流I取值越大,上、下表面的电势差U越大;故D错误;
故选:A.点评:
本题考点: 霍尔效应及其应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
- 我最近使用了一个位移传感器,量程是30KN,精确度0.03,如何计算精度或准确度?
我最近使用了一个位移传感器,量程是30KN,精确度0.03,如何计算精度或准确度?
我初步计算是,0.03*KN=30N,我原来算的是30KN*0.03=900N,看结果感觉不对,哪样算对?如何理解这两者之间的关系,还麻烦您给予详细解答,long_long991年前1 -
7qaf0 共回答了23个问题
|采纳率82.6%你算的都不对,精度0.03是指测量误差在0.03%之内,是比较高的精度,偏差值应该是小于30KN*0.03/100=9N1年前查看全部
- 如图(a)所示的装置可以验证变力做功情况下的动能定理:在一辆小车上安装两挡光片a、b和位移传感器的发射端,光电门传感器、
如图(a)所示的装置可以验证变力做功情况下的动能定理:在一辆小车上安装两挡光片a、b和位移传感器的发射端,光电门传感器、位移传感器的接收端、力传感器安装在水平放置的固定光滑轨道上,将两块磁铁分别安装于力传感器的受力端和小车上对应的位置,且同性磁极相对.
让小车向力传感器方向运动,当挡光片a经过光电门传感器时,计算机记录下此时小车的速度v 0 ,同时触发力传感器以及位移传感器工作,当挡光片b经过光电门时,计算机再次记录下此时小车的速度v t ,同时力传感器和位移传感器停止工作,便可得到这一过程的小车所受的磁力和位移的F-s图象,如图(b)所示.
(1)若小车的质量为m,请写出计算小车动能的增量△E k 的表达式:______.(用已知量和测量量表示)
(2)小车在这一过程做加速度______、速度______的运动.(选填“变大”、“不变”或“变小”)
(3)计算机通过F-s图线可以算出磁力在这一过程中所做的功.请根据学过的知识写出根据F-s图线估算磁力在这一过程所做功大小的方法:______.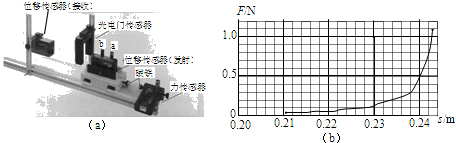 c_vincent1年前1
c_vincent1年前1 -
hansally 共回答了18个问题
|采纳率77.8%(1)由动能的表达式得:△E k =
1
2 mv t 2 -
1
2 mv 0 2 ,
(2)F逐渐增大,根据牛顿第二定律可知,加速度逐渐增大,而加速度方向与速度方向相反,所以速度减小;
(3)F-s图象中,图线与坐标轴围成的面积表示功,所以估算图线下方的面积,其大小即为磁力在这一过程所做功大小.
故答案为:△E k =
1
2 mv t 2 -
1
2 mv 0 2 ;增大,减小;估算图线下方的面积,其大小即为磁力在这一过程所做功大小1年前查看全部
- 在用DIS实验研究小车加速度与外力的关系时,某实验小组先用如图(a)所示的实验装置,重物通过滑轮用细线拉小车,位移传感器
在用DIS实验研究小车加速度与外力的关系时,某实验小组先用如图(a)所示的实验装置,重物通过滑轮用细线拉小车,位移传感器(发射器)随小车一起沿倾斜轨道运动,位移传感器(接收器)固定在轨道一端.实验中把重物的重力作为拉力F,改变重物重力重复实验四次,列表记录四组数据.
a/ms-2 2.01 2.98 4.02 6.00 F/N 1.00 2.00 3.00 5.00 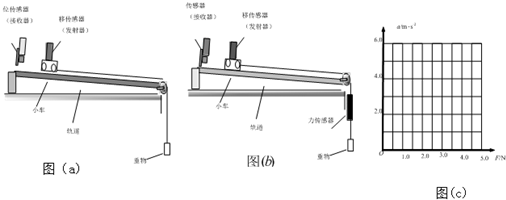
(1)在坐标纸上作出小车加速度a和拉力F的关系图线如图(c);
(2)从所得图线分析该实验小组在操作过程中的不当之处是______;
(3)如果实验时,在小车和重物之间接一个不计质量的微型力传感器来测量绳子的拉力大小,如图(b)所示.是否仍要满足小车质量M远大于重物的质量m______(填“必要”,或“不需要”)游廷光1年前1 -
发狠 共回答了14个问题
|采纳率78.6%解题思路:(1)根据所提供数据采用描点法可正确画出加速度a和拉力F的关系图线.(2)根据所画图象可得出正确结果.(3)如果实验时,在小车和重物之间接一个不计质量的微型力传感器来测量绳子的拉力大小,绳子拉力的变化很精确测出,则不需要满足小车质量M远大于重物的质量m.(1)根据所给数据,画出小车加速度a和拉力F的关系图线如下图所示:
(2)由图象可知,当小车拉力为零时,已经产生了加速度,故在操作过程中倾角过大,平衡摩擦力过度.
(3)如果实验时,在小车和重物之间接一个不计质量的微型力传感器来测量绳子的拉力大小,绳子拉力的变化很精确测出,则不需要满足小车质量M远大于重物的质量m;
故答案为:(1)如图;(2)倾角过大或平衡摩擦力过度;(3)不需要点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 实验装置虽然有所变动,但是实验原理、实验方法、操作细节等是一样的,故任何实验明确实验原理是解答实验的关键.1年前查看全部

- 如图所示,为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 (1)在该实验中必须采用控制
如图所示,为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置。 
(1)在该实验中必须采用控制变量法,应保持___________不变,用钩码所受的重力大小作为___________,用DIS测小车的加速度。
(2)改变所挂钩码的数量,多次重复测量。在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示)。分析此图线OA段可得出的实验结论是_________________________________。
(3)此图线的AB段明显偏离直线,造成此误差的主要原因是___________,
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大midautumnmoon1年前1 -
恋爱留级生 共回答了18个问题
|采纳率94.4%(1)小车的总质量,小车所受外力
(2)在质量不变的条件下,加速度与外力成正比
(3)C1年前查看全部
- (2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k
 (2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )
(2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )
A.磁感应强度B越大,上、下表面的电势差U越大
B.k越大,传感器灵敏度([△U/△z])越高
C.若图中霍尔元件是电子导电,则下板电势高
D.电流I取值越大,上、下表面的电势差U越小tinalpha211年前1 -
lemon_amy 共回答了16个问题
|采纳率100%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.A、最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的长宽高分别为a、b、c,有q
U
c=qvB,电流的微观表达式为I=nqvS=nqvbc,所以U=[BI/nqb].B越大,上、下表面的电势差U越大.电流越大,上、下表面的电势差U越大.故A正确,D错误.
B、k越大,根据磁感应强度B=B0+kz,知B随z的变化越大,根据U=[BI/nqb].知,U随z的变化越大,即传感器灵敏度([△U/△z])越高.故B正确.
C、霍尔元件中移动的是自由电子,根据左手定则,电子向下表面偏转,所以上表面电势高.故C错误.
故选AB.点评:
本题考点: 霍尔效应及其应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
- 用刻度尺和位移传感器测量距离有什么不同和相同的地方?
3914sssss1年前1
-
lala80 共回答了16个问题
|采纳率81.3%位移传感器比刻度尺精确,能精确到小数点后好几位1年前查看全部
- 如图所示为一种微小位移传感器的原理图。1是待测的物体,软铁芯2插在线圈3中并且可以随着物体1在线圈中平移, 为频率一定的
如图所示为一种微小位移传感器的原理图。1是待测的物体,软铁芯2插在线圈3中并且可以随着物体1在线圈中平移,
 为频率一定的正弦交流信号源,A为交流电流表。现将开关S闭合,下列说法正确的是
为频率一定的正弦交流信号源,A为交流电流表。现将开关S闭合,下列说法正确的是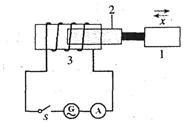
A.该传感器可以将待测物体位移的变化量转换成电路中电流的变化量 B.若待测物体向右平移,电流表的示数将减小 C.若待测物体向左平移,电流表的示数将减小 D.若将信号源换成电压一定的直流电源,该传感器仍可测量出待测物体的位移变化量 丢丢20001年前1 -
深秋的雏菊 共回答了17个问题
|采纳率88.2%解题思路:图中被测物体位移变化,带动软铁芯
2 在线圈中移动,线圈的电感值将变化,这一变化通过转换电路和检测电路输出电流,就得到了被测物体位移的变化。若待测物体向左平移,线圈的电感值将变大,对交流电的阻碍作用变大,电流表的示数将减小AC 正确。AC
1年前查看全部
- 如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用______,应保持小车的总质量不变,用钩码所受的重力作为小车所受外力,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图2所示).分析此图线的AB段明显偏离直线,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦 B.导轨保持了水平状态
C.所挂钩码的总质量太大 D.所用小车的质量太大.新的一刻1年前1 -
3爷爷 共回答了21个问题
|采纳率90.5%解题思路:首先知道该实验在探究三物理量关系时,采用控制变量法;知道本实验的注意事项分析即可.(1)在探究小车的加速度、质量和合外力的关系时,采用控制变量法,即保持小车的总质量不变,探究钩码所受的重力作为小车所受外力和加速度的关系.
(2)本实验需注意两点:一是需要平衡摩擦力,即使长木板倾斜一定角度,使重力沿斜面的分力等于摩擦力;二是需保证小车的质量远大于钩码的质量,这样钩码的重力近似等于小车的拉力.由图看出,AB段明显偏离直线是由于拉力太大,没有满足小车的质量远大于钩码的质量,故ABD错误,C正确.
故答案为:(1)控制变量法;(2)C.点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 题考查了控制变量法的应用、实验数据处理、实验误差分析,实验误差分析是本题的难点;应知道当砝码质量远小于小车质量时,可以认为小车受到的拉力等于钩码重力.1年前查看全部
- 拉绳位移传感器和拉杆式位移传感器的差别有哪些?
小江飞语1年前1
-
kihenglee 共回答了17个问题
|采纳率100%区别:拉绳位移传感器特点如下:结构小巧,安装空间尺寸小;测量行程长一般1000mm~4000mm,精度在0.3%fs左右;防护等级ip65.外壳和线轮均经过防腐处理,牵引绳为不锈钢外敷特氟龙,可以在恶劣的环境下工作;可选输出方式有:电阻型、电压型、电流型、增量脉冲型、绝对脉冲型.拉杆式位移传感器为通用拉杆导电塑胶膜系列,有效行程一般在75mm~1250mm,两端均有4mm缓冲行程,精度0.05%~0.04%fs左右.外壳表面阳极处理,防腐蚀;内置导电塑料测量单元,无温漂,寿命长;具有自动电气接地功能.密封等级为ip67,din430650标准插头插座,可以适用在大多数通用场合;拉杆球头具有0.5mm自动对准功能,允许极限运动速度为10m/s.内置导电塑料单元,碳膜经过多次印刷处理,耐磨损.寿命高达>1000万次以上.广泛用于注塑机,工控控制系统,自动化等领域.从上面特点我们很容易发现一般量程比较大我们就选择拉绳位移传感器量程比较小我们选择拉杆式位移传感器,还有就是拉杆式位移传感器会比拉绳位移传感器精度高一些.1年前查看全部
- 位移传感器有什么特点?有什么不足吗
maaak1年前1
-
v_zhj 共回答了13个问题
|采纳率84.6%位移传感器主要由弹性体、电阻应变敏感元件和变换电路等组成.用电阻应变式微位移传感器组成位置闭环控制系统,电阻应变式微位移传感器是将待测位移转换力电阻量变化的装置.可以将传感器和微位移驱动器集成于一体,而无需附加机构,所以灵敏度高、体积小、利息低、位移分辨率较高,但非线性误差较大,易受温度影响.
参考资料:百度搜索艾驰商城,里面的知识库有很全面的工业品学习资料和完整的产品解决方案,还可以满足你的采购1年前查看全部
- 关于位移传感器的英文文章字数在翻译成中文后在3000左右的就好 还有不要是别人翻过的 最好不要是pdf的(当然实在没好的
关于位移传感器的英文文章
字数在翻译成中文后在3000左右的就好 还有不要是别人翻过的 最好不要是pdf的(当然实在没好的也可以) 如果好的话一定会追加更多分!苹果派09291年前1 -
carrebeann 共回答了25个问题
|采纳率100%LVDT位移传感器:
光栅线位移传感器的结构原理
位 移 传 感 器 工 作 原 理 和 参 数1年前查看全部
- 传感器可将非电学量转化为电学量,起自动控制作用.如计算机鼠标中有位移传感器,电熨斗、电饭煲中有温度传感器,电视机、录像机
传感器可将非电学量转化为电学量,起自动控制作用.如计算机鼠标中有位移传感器,电熨斗、电饭煲中有温度传感器,电视机、录像机、影碟机、空调机中有光电传感器…演示位移传感器的工作原理如右图示,物体M在导轨上平移时,带动滑动变阻器的金属滑杆p,通过电压表显示的数据,来反映物体位移的大小x.假设电压表是理想的,则下列说法正确的是( ) A.物体M运动时,电源内的电流会发生变化 B.物体M运动时,电压表的示数会发生变化 C.物体M不动时,电路中没有电流 D.物体M不动时,电压表没有示数  清宁飘风1年前1
清宁飘风1年前1 -
叼着香烟的鱼 共回答了17个问题
|采纳率94.1%当物体M移动时,接入电路的电阻不变,电阻上的滑片的移动,改变P点左侧部分的长度,
根据欧姆定律,电流不变,左侧电阻发生变化,则电压表示数发生变化,而电流表A示数不变.
故B正确,A、C、D错误.
故选B.1年前查看全部
- 如图实所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
如图实所示为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用控制变量法,应保持________不变,用钩码所受的重力作为
________,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组
数据可画出 a - F 关系图线(如图实-3-11所示).①分析此图线的 OA
段可得出的实验结论是 _______________________________________________________________________
________________________________________________________________________
________________________________________________________________________.
②(单选题)此图线的 AB 段明显偏离直线,造成此误差的主要原因是( )A.小车与轨道之间存在摩擦 B.导轨保持了水平状态 C.所挂钩码的总质量太大 D.所用小车的质量太大  sincethenfly1年前1
sincethenfly1年前1 -
deathnote2007 共回答了17个问题
|采纳率88.2%(1)小车的总质量(或:小车的质量)
小车所受外力(或:外力、合外力)
(2)①在质量不变的条件下,加速度与合外力成正比
②C
:(1)在研究加速度与力的关系时必须保持小车质量不变,才能找出二者的关系.
(2)① OA 段在实验的允许范围内,图线是一条直线,因此可得出 a 与 F 成正比的关系.
②由实验的原理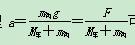 可知 AB 段明显偏离直线是由于没有满足 M 车 ≫ m 钩 造成的.
1年前查看全部
可知 AB 段明显偏离直线是由于没有满足 M 车 ≫ m 钩 造成的.
1年前查看全部

- (2013•宝山区一模)如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.实验操作中
(2013•宝山区一模)如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.实验操作中,用钩码所受的重力作为小车所受外力,用DIS系统测定小车的加速度.在保持小车总质量不变的情况下,改变所挂钩码的数量,多次重复测量,将数据输入计算机,得到如图2所示的a~F关系图线.

(1)小车上安装的是位移传感器的______部分.
(2)分析发现图2线在水平轴上有明显的截距(OA不为零),这是因为______.
(3)图2线AB段基本是一条直线,而BC段明显偏离直线,造成此误差的主要原因是(单选)______
(A)小车与轨道之间存在摩擦
(B)释放小车之前就启动记录数据的程序
(C)实验的次数太多
(D)钩码的总质量明显地大于小车的总质量在多次实验中,如果钩码的总质量不断地增大,BC曲线将不断地延伸,那么该曲线所逼近的渐近线的方程为______.gxdxx1年前1 -
hi29149 共回答了16个问题
|采纳率87.5%解题思路:解决实验问题首先要掌握该实验原理,了解实验的操作步骤和数据处理以及注意事项.
根据图象得出变量之间的关系,知道钩码所受的重力作为小车所受外力的条件.(1)小车上安装的是位移传感器的发射器,木板左端安装的是传感器的接受器;
(2)由图2可知,当力F等于某一个值的时候才有加速度,说明做实验之前没有平衡摩擦力;
(3)当钩码的质量远小于小车的总质量时,钩码所受的重力才能作为小车所受外力,如果增大钩码的质量,则外力增大,AB这一曲线不断延伸,
那么加速度趋向为a=g;
故选D
故答案为:(1)发射器
(2)小车所受的摩擦力过大
(3)D,a=g(a=10m/s2)点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 实验装置虽然有所变动,但是实验原理、实验方法、操作细节等是一样的,故任何实验明确实验原理是解答实验的关键.1年前查看全部
- (2009•江门二模)演示位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P在均匀电阻丝上滑
 (2009•江门二模)演示位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P在均匀电阻丝上滑动,通过理想电压表显示的数据来反映物体的位移x.设定电源电动势为E,内阻不计,若电压表的示数U随时间t的变化关系如图乙所示,则下列说法正确的是( )
(2009•江门二模)演示位移传感器的工作原理如图甲所示,物体M在导轨上平移时,带动滑动变阻器的金属杆P在均匀电阻丝上滑动,通过理想电压表显示的数据来反映物体的位移x.设定电源电动势为E,内阻不计,若电压表的示数U随时间t的变化关系如图乙所示,则下列说法正确的是( )
A.t1时刻P在最右端
B.0--t1时间内物体M向右做匀速运动
C.0--t1时间内物体M向右做匀加速运动
D.t1--t2时间内物体M向左做匀减速运动填心1年前1 -
hujixi 共回答了30个问题
|采纳率83.3%解题思路:本题中理想电压表对电路没有影响,电压表测量变阻器左侧的电压.根据电压表的读数,分析滑片P的位置.根据欧姆定律和电阻定律得到电压表读数与物体位移x的关系式,再分析物体的运动情况.A、电压表测量变阻器左侧的电压.t1时刻U=0,则说明P在最左端.故A错误.
B、C设物体的位移为x时,电压表的读数为U,变阻器的总长为L,总电阻为R,则根据欧姆定律和电阻定律得
U=
x
LE,
由图知,0-t1时间内U=kt,k是比例系数,则得x=
kL
Et,x与t成正比,说明物体M向右做匀速运动.故B正确,C错误.
D、同理可知,t1--t2时间内物体M向左做匀速运动.故D错误.
故选B点评:
本题考点: 闭合电路的欧姆定律.
考点点评: 本题是力电综合题,抓住它们之间的联系.本题通过位移将力电联系起来,这是解决本题的关键.1年前查看全部
- 利用如图甲所示的装置测量滑块和滑板间的动摩擦因数,将质量为M的滑块A放在倾斜滑板B上,C为位移传感器,它能将滑块A到传感
利用如图甲所示的装置测量滑块和滑板间的动摩擦因数,将质量为M的滑块A放在倾斜滑板B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示出滑块A的速度-时间(v-t)图象.先给滑块A一个沿滑板B向上的初速度,得到的v-t图象如图乙所示,则( )
 A. 滑块A上滑时加速度的大小为8m/s2
A. 滑块A上滑时加速度的大小为8m/s2
B. 滑块A下滑时加速度的大小为8m/s2
C. 滑块与滑板之间的动摩擦因数μ=0.25
D. 滑块A上滑时运动的位移为2mapplypig1年前1 -
树动风随摆 共回答了21个问题
|采纳率90.5%解题思路:根据速度时间图线的斜率求出上滑和下滑的加速度大小.根据图线与时间轴围成的面积求出上滑的位移.根据牛顿第二定律求出 滑块与木板间的动摩擦因数.A、上滑的加速度大小为:a1=
△v
△t=
4
0.5m/s2=8m/s2,故A正确;
B、下滑的加速度大小为:a1=
△v
△t=
4
1m/s2=4m/s2.故B错误.
C、上滑过程中,根据根据牛顿第二定律得:由牛顿第二定律
A上滑时:mgsinθ+μmgcosθ=ma1
A下滑时:mgsinθ-μmgcosθ=ma2
解得:μ=0.25.故C正确.
D、图线与时间轴围成的面积表示位移,则有:x=
1
2×4×0.5m=1m.故D错误.
故选:AC.点评:
本题考点: 牛顿第二定律;匀变速直线运动的位移与时间的关系.
考点点评: 解决本题的关键知道图线的斜率表示加速度,图线与时间轴围成的面积表示位移1年前查看全部
- 位移传感器内装有红外线和超声波发射器,红外线和超声波的速度为V1,V2,
位移传感器内装有红外线和超声波发射器,红外线和超声波的速度为V1,V2,
位移传感器内装有红外线和超声波发射器,红外线和超声波的速度为V1、V2,接受器接受到的红外线和超声波的时间差为△t,试推出发射器和接受器之间的距离关系式
V1V2/(V1-V2) 这个答案是怎么算出来的 求教 谢谢
三星小胖1年前1 -
铁键宁静 共回答了14个问题
|采纳率78.6%设距离为S,接收器接受红外线的时间为t1,接收到超声波的时间为t2
t1=S/V1
t2=S/V2
△t=S/V2-S/V1 (显然光速比声速快,所以t2比t1大)
得S=△t*V1V2/(V1-V2)
说明你的答案把△t给丢了1年前查看全部
- (2009•崇明县模拟)用DIS位移传感器研究小车直线运动的实验中,得到了如图所示的一个S-t图象,A、B、C、D是图象
 (2009•崇明县模拟)用DIS位移传感器研究小车直线运动的实验中,得到了如图所示的一个S-t图象,A、B、C、D是图象上的四个点,从图象中可以得出小车在AD区域内的位移是______m;在AC区域内平均速度为______m/s;从图象还能推断,小车在运动过程中所受的合外力方向与它的速度方向______(填“相同”、“相反”或“垂直”) linian20001年前1
(2009•崇明县模拟)用DIS位移传感器研究小车直线运动的实验中,得到了如图所示的一个S-t图象,A、B、C、D是图象上的四个点,从图象中可以得出小车在AD区域内的位移是______m;在AC区域内平均速度为______m/s;从图象还能推断,小车在运动过程中所受的合外力方向与它的速度方向______(填“相同”、“相反”或“垂直”) linian20001年前1 -
applehero 共回答了18个问题
|采纳率88.9%解题思路:根据S-t图象得AD区域内的位移.
根据
=[x/t]可知AC区域内平均速度..v 根据S-t图象得AD区域内的位移是0.49 m.
根据
.
v=[x/t]可知AC区域内平均速度
.
v=[x/t]=0.12 m/s
s-t图象的斜率等于物体的速度,从图象还能推断物体做加速运动,
所以小车在运动过程中所受的合外力方向与它的速度方向相同.
故答案为:0.490.12相同.点评:
本题考点: 探究小车速度随时间变化的规律.
考点点评: 本题是s-t图象的应用题,主要考查图象的斜率等于物体的速度,匀变速运动的x-t图象是抛物线.1年前查看全部
- 如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
如图1为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置.
(1)在该实验中必须采用控制变量法,应保持______不变,用钩码所受的重力作为______,用DIS测小车的加速度.
(2)改变所挂钩码的数量,多次重复测量.在某次实验中根据测得的多组数据可画出a-F关系图线(如图2所示).分析此图线的OA段可得出的实验结论是______.mm哟1年前1 -
wowsome 共回答了22个问题
|采纳率95.5%(1)探究加速度与力的关系,应保持小车的质量不变,用钩码所受的重力作为小车受到的合外力.
(2)由图象OA段可知,图象是一条直线,a与F成正比,即:在小车质量一定时,加速度a与小车受到的合力F成正比;
故答案为:(1)小车质量;小车受到的合外力;(2)在质量不变的情况下,加速度与合外力成正比.1年前查看全部
大家在问
- 1(20w4•红河州模拟)20we年w2月2日,我国在西昌卫星发射中心用“长征三号甲”运载火箭将“嫦娥三号”探月卫星成功送
- 2若有理数x,y,z满足(x—1)2016+|2x—y|+|x—3z|=o,求3x—5y—9z的值.要全部过程,如果答对有
- 3把24米长的红丝带平均分成8份,是把( ) 看做单位1( )份占全长的8分之3
- 4(2013•深圳二模)如图是用二分法求方程x2-2=0近似解的程序框图,若输入x1=1,x2=2,ɛ=0.3,则输出的m
- 5Kitty lay in bed .Kitty heard someone was knocking on the do
- 6一种药水原价每瓶3.8元,降价后为3.42元.现价比原价降低了百分之几?
- 7把7分之3,8分之3和7分之4从小到大排列是( )
- 8穴宝盖下一个出是什么字?RT没分啦 哎.
- 91,2,3,4,5,6,8,12,24这九个数分别放在一个3乘3的正方形表格里,在一条直线上的三个数相乘积相等
- 10一项工程甲队单独做12天完成,乙队单独做15天完成,丙队单独做要20天完成.按原定计划这
- 11( )are you going?-I am going to school.A.Where B.What C.When
- 12用八个在造句 急要!最后加上一个到处
- 131.-Have you been to the Great Wall?
- 14地图三要素是指什么?具体指什么?
- 15怎么才能让鸡蛋浮起来呢?