我想让PLC伺服控制,按下启动,就一直运行,DRVI S1 S2 D1 D2 中S1是写多少,
 zhaiyong85102022-10-04 11:39:541条回答
zhaiyong85102022-10-04 11:39:541条回答
已提交,审核后显示!提交回复
共1条回复
 sifu_he 共回答了15个问题
sifu_he 共回答了15个问题 |采纳率86.7%- 那不是这个指令 你要用那个速度指令
按下 就以恒定频率发出脉冲的指令就可以了 - 1年前
相关推荐
- 自动控制原理习题答案设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:G(s)=K/{s(0.2s+1)(0.5s+1
自动控制原理习题答案
设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:G(s)=K/{s(0.2s+1)(0.5s+1)},若要求系统最大输出速度为12°/s,输出位置的容许误差小于2°,试求 1、确定满足上述指标的小K值,计算该K值下系统的相角裕度和幅值裕度
2、在前向通路中串接超前校正网络G0(s)=(0.4s+1)/(0.08s+1)sunshinesw1年前1 -
error-man 共回答了24个问题
|采纳率87.5%题目的意思是输入信号是速度信号12t,稳态误差2
所以K=12/2=6
剩下的就照书上例题步骤解1年前查看全部
- 伺服比例阀属于电液伺服阀还是电液比例阀?
842965501年前1
-
星眸 共回答了14个问题
|采纳率85.7%伺服比例阀是采用比例电磁铁作为电-机械转换器,而功率级滑阀又采用伺服阀的加工工艺,是比例和伺服技术紧密结合的结果.伺服比例阀阀芯采用伺服阀的结构和加工工艺(零遮盖阀口、阀芯与阀套之间的配合精度与伺服阀相当),解决了闭环控制要求死区小的问题.它的性能介于伺服阀和普通比例阀之间.1年前查看全部
- 电反馈伺服比例阀用于AGC液压位置控制系统中,电反馈小闭环还起作用吗?AGC液压位置控制系统是典型的闭环控制系统,伺服比
电反馈伺服比例阀用于AGC液压位置控制系统中,电反馈小闭环还起作用吗?AGC液压位置控制系统是典型的闭环控制系统,伺服比例阀主阀芯的电反馈小闭环还作用吗?幸福大使1年前1
-
mayxuelian 共回答了23个问题
|采纳率95.7%闭环控制比例阀选型原则1、选择零遮盖阀芯的比例阀2、选择当相位差在90时,频率响应特性至少在30HZ以上的比例阀3、用于位置控制时,选用线性特性阀芯4、重复精度和滞环小于等于0.2%5、阀芯最大流量的选择应高于最大调节流量的10%-25%(同时保证对最小流量值和液压增益进行更好的控制.)6、当运动速度较高并且位置精度要求也较高时,可选用线性双斜率调节线性双斜率调节的意思?查看原帖1年前查看全部
- 69,()不是伺服系统的组成部分 A,电机 B,可编程序控制器 C,位置测量元件伺服系统 D,反馈电路
vangsheng1年前1
-
茂密06 共回答了20个问题
|采纳率95%选B 可编程控制器!伺服控制系统多用应该是微处理器、控制板,可编程控制器多用于工业控制.1年前查看全部
- 求英语高手翻译这一句(英译汉)针对高射火炮这一高速、高精度数字伺服系统,在单位阶跃输入信号的作用下,我们希望其过渡过程为
求英语高手翻译这一句(英译汉)
针对高射火炮这一高速、高精度数字伺服系统,在单位阶跃输入信号的作用下,我们希望其过渡过程为最佳的过渡过程,即时间最优控制.风月无华1年前2 -
ch00208712 共回答了22个问题
|采纳率100%In connection with the high-speed,high-precision digital servo system,we hope that it has the best transition process,namely the time optimal control,under the action of unit step input signal .1年前查看全部
- 谁帮我翻译下:“工缝永磁交流无刷伺服节能电机”,这几个字!
zhenxin0281年前1
-
一条深飘的鱼 共回答了16个问题
|采纳率93.8%Industrial Sewing energy permanent magnet AC brushless servo motors1年前查看全部
- 英语翻译2.1有源伺服反馈的基本原理及结构利用有源伺服反馈技术拓展拾振器低频特性的基本原理是利用有源伺服反馈技术增加摆系
英语翻译
2.1有源伺服反馈的基本原理及结构
利用有源伺服反馈技术拓展拾振器低频特性的基本原理是利用有源伺服反馈技术增加摆系统的质量,从而达到降低系统自振频率的目的.传感器原理如图2所示,X为被测物体相对于惯性参考系(地球)的位移,称之为绝对位移;x为摆体相对于被测物体的位移,称之为相对位移;k为弹簧刚度;b为系统阻尼系数;m为摆体质量;G1为主线圈机电耦合常数;G2为反馈线圈机电耦合常数;i为流入反馈线圈的电流;R为负载电阻;K为放大倍数;KD(1+TDs)为比例微分环节.云过留风1年前1 -
360卫士 共回答了16个问题
|采纳率100%The basic principles and structure of the 2.1 active servo feedback
Active servo feedback technology to expand the low-frequency characteristics of the pick-up device,the basic principle is to use active servo feedback technology to increase the quality of the pendulum system,to achieve the purpose of reducing system natural frequency.Sensor principle shown in Figure 2,X is the measured object relative to the displacement of the inertial reference system (Earth),called the absolute displacement; x is the pendulum relative to the displacement of the measured object,called the relative displacement; k spring stiffness; b for the system damping; m is the quality of the pendulum; G1,the main coil electromechanical coupling constant; G2 electromechanical coupling constant of the feedback coil; i is the current into the feedback loop; R is the load resistance; K magnification; the KD (1 + TDs,) for the proportion of differential link.1年前查看全部
- 数控机床,回参考点动作时,X、Y轴正常,z轴不能够执行并且会导致伺服报警,Z轴电机温度很高
数控机床,回参考点动作时,X、Y轴正常,z轴不能够执行并且会导致伺服报警,Z轴电机温度很高
开机后,对各轴执行回参考点动作时,X、Y轴均正常,z轴不能够执行并且会导致伺服报警,其现象是发现Z轴电机温度很高.试分析可能的原因
作业题……135455191年前1 -
bombman80 共回答了17个问题
|采纳率88.2%1电机刹车坏2电机坏3驱动坏4丝杠螺母副坏5丝杠两端轴承坏6电机缺相
先把电机拆了用摇杆摇丝杠排除机械问题 再把电机放旁边用手轮慢慢摇看负载 如果负载大则刹车没放松,再看看刹车线电机摇的时候有没刹车电压,如果有则刹车坏1年前查看全部
- 英语翻译结构谐振特性是导引头伺服系统的重点与难点,也是制约导引头伺服系统性能提高的主要因素.提高结构谐振频率一般是采用提
英语翻译
结构谐振特性是导引头伺服系统的重点与难点,也是制约导引头伺服系统性能提高的主要因素.提高结构谐振频率一般是采用提高结构刚度和减小转动惯量等方法实现.由于弹上产品的特点,导引头伺服系统体积、重量等限制,使得通过上述方法提高谐振频率变得十分困难.为此,本文提出在控制回路中,串接双T型陷波器达到抑制结构谐振峰值,减小在振动条件下伺服系统高频抖动的幅值,提高伺服系统稳定性的目的.通过考虑结构谐振的建模、仿真及试验验证,表明在直驱导引头伺服系统中,串接双T型陷波器在静态下不影响性能,在振动条件下,明显降低了导引头伺服系统的高频抖动幅度.通过试验,验证了串联双T型陷波器(阻尼系数为0.7),抑制谐振带来的抖动效果明显,抖动角速度幅度减小了近一倍.上述方法为导引头伺服系统产品提供了一种抑制谐振的有效途径.
本文还提出了状态反馈抑制导引头伺服系统谐振的控制方法,通过仿真验证了其在抑制系统机械谐振方面的有效性.
请将上述文字翻译为英文,糟蹋艺术1年前1 -
Vanny90 共回答了24个问题
|采纳率83.3%先到百度文库,找一篇此类文档中文的,然后用有道翻译,或是谷歌在线翻译翻成英
文,然后把英文放上面,中文放下面.希望可以帮到你.如果要找标准的PDF格式外文文
献,可以在谷歌,用英文文献名+空格+PDF 这样比较容易找到.
第一是Google搜索,主要是英文,尤其是其学术搜索,意义大.
第二,通过各大学图书馆系统,进入几个主流的出版发行集团.
第三,利用网络免费储存、电子书系统.尤其是国外多.
1、论文题目:要求准确、简练、醒目、新颖.
2、目录:目录是论文中主要段落的简表.(短篇论文不必列目录)
3、提要:是文章主要内容的摘录,要求短、精、完整.字数少可几十字,多不超过三百字为宜.
4、关键词或主题词:关键词是从论文的题名、提要和正文中选取出来的,是对表述论文的中心内容有实质意义的词汇.关键词是用作机系统标引论文内容特征的词语,便于信息系统汇集,以供读者检索.每篇论文一般选取3-8个词汇作为关键词,另起一行,排在“提要”的左下方. 主题词是经过规范化的词,在确定主题词时,要对论文进行主题,依照标引和组配规则转换成主题词表中的规范词语.
5、论文正文: (1)引言:引言又称前言、序言和导言,用在论文的开头.引言一般要概括地写出作者意图,说明选题的目的和意义,并指出论文写作的范围.引言要短小精悍、紧扣主题. 〈2)论文正文:正文是论文的主体,正文应包括论点、论据、 论证过程和结论.主体部分包括以下内容: a.提出-论点; b.分析问题-论据和论证; c.解决问题-论证与步骤; d.结论.
6、一篇论文的参考文献是将论文在和写作中可参考或引证的主要文献资料,列于论文的末尾.参考文献应另起一页,标注方式按《GB7714-87文后参考文献著录规则》进行. 中文:标题--作者--出版物信息(版地、版者、版期):作者--标题--出版物信息 所列参考文献的要求是: (1)所列参考文献应是正式出版物,以便读者考证. (2)所列举的参考文献要标明序号、著作或文章的标题、作者、出版物信息.
一,选题要新颖.
这次我的论文的成功,和高分,得到导师的赞许,都是因为我论文的选题新颖所给我带来的好处.最好涉及护理新领域,以及新进展,这样会给人耳目一新的感觉.
二,大量文献做基础
仔细查阅和你论文题目和研究范围相关的文献,大量的文献查阅会你的论文写作铺垫,借鉴别人的思路,和好的语言.而且在写作过程不会觉得语言平乏,当然也要自己一定的语言功底做基矗
三,一气呵成
做好充分的准备,不要每天写一些,每天改一些,这样会打断自己的思路,影响文章的连贯.
四,尽量采用多的专业术语
可能口语化的表达会给人带来亲切感,但论文是比较专业的形式,是有可能做为文献来查阅和检索的,所以论文语言的专业化,术语化会提升自己论文的水平.
五,用正规格式书写
参考正规的论文文献,论文格式.不要因为格式问题,而影响到你论文的质量.
六,最好在计算机上完成写作过程
如果有条件最好利用电脑来完成写作过程,好处以下几点:1,节省时间,无论打字的速度慢到什么程度,肯定要比手写的快.2,方便,大量的文献放在手边,一个一个查阅是很不方便的,文献都是用数据库编辑,所以都是在电脑上完成.提前先在电脑上摘要出重点,写出提纲,随时翻阅,方便写作.3,修改编辑,在电脑随时对文章进行修改编辑都是非常的方便.4,随时存档,写一段,存一段,防止突然停电,或者电脑当机.本人就是吃了这个大亏,一个晚上的劳动,差点就全没了,幸亏男友是电脑高手,帮我找回.否则就恨着电脑,哭死算了.
七,成稿打印好交给导师
无论你的字写的多么优美,还是按照惯例来,打印出的文字显的正规,而且交流不存在任何的问题,不会让导师因为看不懂你的龙飞凤舞,而低估你的论文.而且干净整洁,女孩子不仅注意自己的形象问题,书面的东西也反映你的修养和气质.
八,听取导师意见,仔细修改
导师会给你一些关于你论文建设性的意见,仔细参考,认真修改.毕竟导师是发表过多篇论文,有颇多的经验.1年前查看全部
- 全数字伺服系统具有哪些特点
盼盼果1年前1
-
ww传奇01 共回答了17个问题
|采纳率100%①具有较高的动、价态特性.在检洲灵教度、时间心度橄移、嗓声及外部干扰等方面都优于倪合式问服系统.
②数字伺服系统的控制两彼环节全部软件化.很容易引进经典和现代控制理论中的许多控刹策略.如比例比例一积分(PI)和比例一积分一徽分(PID)控制等.而且这些控制调节的结构和参效可以通过软件进行设定和修改.这样可以使系统的控制性能排到进一步提高,以达到鼓佳控制效果.③引人前饮控制,实际上构成了具有反饭和前该的复合控侧的系统结构.这种系统在理论上可以完全消除系统的朴态位I误差.速度、加速度误差以及外界扰动引起的误差.即实现完全的无误差调节.④由于是软件控制.在数字伺服系统中,可以顶先设定教谊进行反向间隙补偿.可以进行定位精度的软件补偿,设置因热变形成机构受力变形所引起的定位误差,也可以在实洲出数据后通过软件进行补偿.因机械传动件的今数(如丝杠的螺距)或因使用要求的变化而要求改变脉冲-12(即最小设定单位)时.可通过设定不同的指令脉冲倍率(CMR)或检侧脉冲倍率(DMR)的办法来解决.1年前查看全部
- 工缝永磁交流无刷伺服节能电机翻译:Industrial Sewing energy permanent magnet A
工缝永磁交流无刷伺服节能电机翻译:Industrial Sewing energy permanent magnet AC brushless servo motor和Workers stitch magnet brushless ac servo motor energy哪句更准确?lhdcc1年前1
-
wanghaolei 共回答了8个问题
|采纳率100%Industrial Sewing energy permanent magnet AC brushless servo motors1年前查看全部
- 伺服轴的旋转轴和直线轴有什么区别啊
wangding11021年前1
-
新鲜每一天 共回答了17个问题
|采纳率88.2%伺服轴的旋转轴即是旋转来进行分度,而直线轴是通过加一直线结构(比如滚珠丝杠,电动缸等)来由旋转变成直线行走.1年前查看全部
- 英语翻译1 切断交流电源后,伺服驱动器充电指示灯未熄灭前,表示伺服系统内部仍有高压,十分危险,请勿触摸内部电路及零部件.
英语翻译
1 切断交流电源后,伺服驱动器充电指示灯未熄灭前,表示伺服系统内部仍有高压,十分危险,请勿触摸内部电路及零部件.
2 机台接地端请务必正确接地.
3 严禁私自改装,更换控制板及零部件,否则有触电,机台错误动作等危险
4 请勿对机台内部的零部件进行耐压测试、机械零件用力敲打等,造成零件受损.
5 * 押出机主机电源线用3相380V,50平方以上的主电源线,须接地线
** 搅拌马达电源线接至电箱内,须接地线
*** 水槽下鼓风机马达电源线接至电箱内,须接地线
**** 接切粒机主电源线3相380V,须接地线
6 将变频器马达接线U.V.W任意两相调换即可skykty1年前1 -
zangdaoyong2008 共回答了22个问题
|采纳率86.4%1 切断交流电源后,伺服驱动器充电指示灯未熄灭前,表示伺服系统内部仍有高压,十分危险,请勿触摸内部电路及零部件.
2 机台接地端请务必正确接地.
3 严禁私自改装,更换控制板及零部件,否则有触电,机台错误动作等危险
4 请勿对机台内部的零部件进行耐压测试、机械零件用力敲打等,造成零件受损.
5 * 押出机主机电源线用3相380V,50平方以上的主电源线,须接地线
** 搅拌马达电源线接至电箱内,须接地线
*** 水槽下鼓风机马达电源线接至电箱内,须接地线
**** 接切粒机主电源线3相380V,须接地线
6 将变频器马达接线U.V.W任意两相调换即可
1 AC power supply cut off,the servo drive is not put out before the charging indicator light,said high-pressure servo-system is still very dangerous,do not touch the internal circuits and components.
2 client machine grounding grounding be sure to correct.
3,no unauthorized alterations,replacement panels and parts,or electric shock,machine moves,such as the risk of error
4 Do not machine parts and components for internal pressure testing,mechanical parts such as hard hit,resulting in damaged parts.
5 * Extruder mainframe power cord with 3-phase 380V,50 more than the square of the main power line,ground line shall be
** Stirring motor to electric power line access box shall be grounded line
*** Blower motor under the sink then the power cord to power the box,be grounded line
**** Then the main power line granulator 3 phase 380V,line to be grounded
6 Inverter UVW motor wiring can swap any two-phase1年前查看全部
- 数控机床按伺服系统的控制方式分类可分为哪几种?它们之间的区别是什么?
muyushi20041年前1
-
cml_wlx 共回答了19个问题
|采纳率89.5%1、开环控制,精度最低.2、半闭环控制,伺服编码器反馈到数控系统,精度较高.3、闭环控制,反馈信号一般是从光栅尺反馈到数控系统,精度最高.1年前查看全部
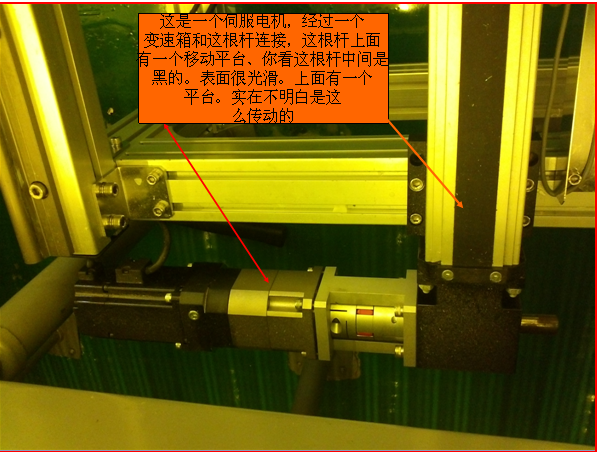
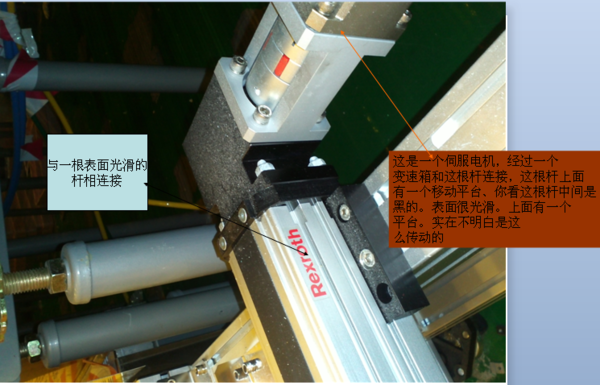
- 高手请帮忙看一下,下图是一个伺服电机控制一个平台的移动,一般我们就是用一个伺服和一个丝杆就可以了.
高手请帮忙看一下,下图是一个伺服电机控制一个平台的移动,一般我们就是用一个伺服和一个丝杆就可以了.

但是下面这个我有点看不明白.伺服通过一个方形的杆来控制平台移动.这根杆是表面是光滑的,看不出机械啮合的部分,没有机会拆开它,不知道他是怎么控制平台移动的,求高手看一下.谢谢!


ketty_wh1年前1 -
alansure 共回答了17个问题
|采纳率88.2%Rexroth,有钱的主啊!
这是一个精密直线移动平台,下一个国产的,你看看这个结构:
这个结构理解一下,这些基本都差不多的.1年前查看全部

- 伺服轴,矢量轴,V/F 轴分别是啥意思啊?
meng12211年前1
-
真正的爱 共回答了16个问题
|采纳率87.5%矢量轴=电流矢量驱动方式的电机轴,优点是速度环稳定,低频输出扭矩大点.V/F轴=电压频率驱动方式的电机轴,老的变频技术基本都是这种模式,缺点低频扭矩不足,速度环稳定性差.大概就是这样.1年前查看全部
- 基于视觉的移动机器人的控制系统组成框图是什么,已知组成是视觉系统.伺服系统.处理器.运动系统.这四部分用框图表示出来是怎
基于视觉的移动机器人的控制系统组成框图是什么,已知组成是视觉系统.伺服系统.处理器.运动系统.这四部分用框图表示出来是怎样的.能详细说说每个的功能也行.zhenglu10101年前0
-
共回答了个问题
|采纳率
- 伺服阀 比例阀 方向阀 比例液压阀 比例方向阀 伺服方向阀 伺服液压阀 求解释这些名词.
yoppies1年前1
-
Lincui 共回答了15个问题
|采纳率93.3%1.液控伺服阀是在伺服系统中将电信号输入转换为功率较大的压力或流量压力信号输出的执行元件.它是一
种电液转换和功率放大元件.伺服阀的灵敏度高,快速性好,能将很小的电信号(例如10毫安)转换成很大的液压功率(如几十匹马力以上),可以驱动多种类型的负载.
2. 电液比例阀是阀内比例电磁铁根据输入的电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此
完成与输入电压成比例的压力、流量输出的元件.
3.液压阀是在液压传动中用来控制液体压力﹑流量和方向的元件.其中控制压力的称为压力控制阀,控制流量的称为流量控制阀,控制通﹑断和流向的称为方向控制阀.方向控制阀按用途分为单向阀和换向阀.1年前查看全部
- 69,()不是伺服系统的组成部分 A,电机 B,可编程序控制器 C,位置测量元件伺服系统 D,反馈电路
applecheok1年前1
-
aa王子 共回答了10个问题
|采纳率90%选B 可编程控制器!伺服控制系统多用应该是微处理器、控制板,可编程控制器多用于工业控制.1年前查看全部
- 名词解释,伺服机构是什么意思?
ha125981年前2
-
lisen0001 共回答了25个问题
|采纳率100%伺服机构(Servo-Mechanist,)这是一种伺服系统,其中被控量为机械位置或机械位置对时间的导数.
伺服机构(servomechanism)系指经由闭回路控制方式达到一个机械系统位置、速度、或加速度控制的系统.1年前查看全部
- 三菱PLC控制伺服反转回原点三菱控制伺服要求是要反转回原点的,而书上都介绍回原点的是一直都是朝一个方向运动的,想问,如果
三菱PLC控制伺服反转回原点
三菱控制伺服要求是要反转回原点的,而书上都介绍回原点的是一直都是朝一个方向运动的,想问,如果要反转回原点,用ZRN指令,那么,什么时候反转合适?是近点开关一感应到就马上反转,还是爬行直至离开感应器ZRN指令执行完毕,利用M8029的动作再执行其他发脉冲的指令反转?这时反转要捕捉多少个Z脉冲才是定原点完成?第一个?不行吧,因为如果像前面所说已经离开近点开关了,反转一圈未必已离开近点开关,有可能刚处在开关位置,显然这时停下是不合适的吧?胭醉1年前1 -
k7idgjwa 共回答了22个问题
|采纳率77.3%DZRN K-10000 K1000 X0 Y0
这样就能反转回去了,不过你的原点感应要设在电机反转回去的路上,之后M8029接通,假如要再走距离的话,就是DZRN K10000 K1000 Y0 Y11年前查看全部
- 1:传感器的定义?2:什么是伺服系统?3:什么是整流?4:什么是压电效应?5;简述机电一体化系统的组成?
purple_love071年前1
-
52153 共回答了16个问题
|采纳率93.8%传感器:物理量(力、声,光等)到电学量(电压、电流,电阻等)转换的器件
伺服系统不清楚
整流:交流电变为脉动直流电(方向不变但大小不断变化)的过程
压电效应:某些特殊的材料(比如压电陶瓷),在受到机械的压力时,会在其表面产生电荷的现象
机电一体化:就是机械跟电子密切联系在一起的意思,具体组成看书
打字好累1年前查看全部
大家在问
- 1英语翻译一个省级的协会的“秘书长”和“秘书处主任”的名称怎么翻译?我们是要印刷名片用的.还有,“手机号码”应该翻译成什么
- 2求记初中数学笔记的方法如何记好笔记:1课堂笔记 2错题记录法 课堂如何集中精神/
- 3In England, afternoon tea is the mo
- 4三个有理数a b c 它们的积为负数,和为正数,且X=a/IaI+b/IbI+c/IcI+IabI/ab+IbcI/bc
- 5同学们利用如图所示装置探究“凸透镜成像的规律”后,又想采用实验中的装置来比较甲、乙、丙、丁四个透镜焦距的大小,在实验中测
- 6氧气焊什么氧气都能用吗
- 7如右图,平行四边形ABCD中,AO=OC,BO=DO,S△AEF=10平方厘米,S△AFB=15平方厘米求阴影部分面积
- 8一次函数y=(k-1)x+2k-4的图像不经过第二象限,k的取值范围?
- 9rupert.grint这个地址是真的吗?
- 1016(a+2b)^2-25因式分解
- 11火车上的玻璃为什么不起露珠当火车内外有很大的温差时为什么里面不起露珠?
- 12朋友 作文
- 13表示情况紧急或危险的成语
- 14一支平底锅上可煎两条鱼,一条鱼要六分钟(正反面各要三分钟),那么煎四条鱼至少要几分钟?
- 15为鼓励居民节约用水,自来水公司规定:每户每月用水15吨以内(含15吨)按1.2元一吨收费;超过15吨的,其超出的吨数按5