霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B 0 +kx(B 0 、k均
 winowner2022-10-04 11:39:541条回答
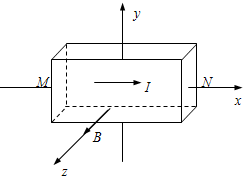
winowner2022-10-04 11:39:541条回答 霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B 0 +kx(B 0 、k均为大于零的常数).薄形霍尔元件的工作面垂直于光轴,通过的电流I方向沿z轴负方向,霍尔元件沿x轴正方向以速度v匀速运动.要使元件上、下表面产生的电势差变化得快,可以采取的方法是( )
 |
已提交,审核后显示!提交回复
共1条回复
 zeny_zhong 共回答了23个问题
zeny_zhong 共回答了23个问题 |采纳率91.3%- 最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的上下表面的间距为d,有:
q
U
d =qvB
电流的微观表达式为:
I=nqvS
联立解得:
U=
BdI
nqS ①
A、由①式,U∝I;增加电流时,元件上、下表面产生的电势差变化得快;故A正确;
B、C、D、由①式,U∝B;霍尔元件沿x轴正方向以速度v匀速运动,要使元件上、下表面产生的电势差变化得快,则需要磁感应强度变化加快;由于B=B 0 +kx,根据可以通过增加k或v来使元件上、下表面产生的电势差变化得快;故B错误,C错误,D错误;
故选:A. - 1年前
相关推荐
- 汽车曲轴位置传感器类型我恳求哪位内行人士回答一下汽车曲轴位置传感器怎样才能判别是电磁式还是霍尔式我有一曲轴传感器为3端有
汽车曲轴位置传感器类型
我恳求哪位内行人士回答一下汽车曲轴位置传感器怎样才能判别是电磁式还是霍尔式我有一曲轴传感器为3端有3引脚不知道这三个引脚都是做什么的,如图知道的最好能说明3脚分别接法.
 1113941年前1
1113941年前1 -
刚旦 共回答了25个问题
|采纳率84%霍尔式的,如果是磁感应式的只要两根线就够了.
一根是电源电压,分为14.4V或5V两种,
一根是信号电压,当电源电压为14.4v时,信号高电平9.8v;当电源为5V,信号高电平为4.8V.低电平时应该在0.1V-0.3V.
还有一根是接地.1年前查看全部
- (2013•江西二模)霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为
 (2013•江西二模)霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )
(2013•江西二模)霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )
A.传感器灵敏度[△U/△z]与上、下表面的距离有关
B.当物体沿z轴方向移动时,上、下表面的电势差U变小
C.传感器灵敏度[△U/△z]与通过的电流有关
D.若图中霍尔元件是电子导电,则下板电势高whg1969061年前1 -
haot 共回答了19个问题
|采纳率84.2%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.BC、最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的长宽高分别为a、b、c,
有q[U/c]=qvB,电流的微观表达式为I=nqvS=nqvbc,所以U=[BI/nqb].I越大,上、下表面的电势差U越大.电流越大,上、下表面的电势差U越大,而沿z轴方向移动时,不影响电势差的变化.故B错误,C正确.
A、k越大,根据磁感应强度B=B0+kz,知B随z的变化越大,根据U=[BI/nqb].知,U随z的变化越大,即传感器灵敏度([△U/△z])越高.故A正确.
D、霍尔元件中移动的是自由电子,根据左手定则,电子向下表面偏转,所以上表面电势高.故D错误.
故选:AC.点评:
本题考点: 传感器在生产、生活中的应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
- (2014•南通一模)霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B0+k
 (2014•南通一模)霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B0+kx(B0、k均为大于零的常数).薄形霍尔元件的工作面垂直于光轴,通过的电流I方向沿z轴负方向,霍尔元件沿x轴正方向以速度v匀速运动. 要使元件上、下表面产生的电势差变化得快,可以采取的方法是( )
(2014•南通一模)霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B0+kx(B0、k均为大于零的常数).薄形霍尔元件的工作面垂直于光轴,通过的电流I方向沿z轴负方向,霍尔元件沿x轴正方向以速度v匀速运动. 要使元件上、下表面产生的电势差变化得快,可以采取的方法是( )
A.增大 I
B.增大B0
C.减小k
D.减小v爱情渣子1年前1 -
找人1 共回答了19个问题
|采纳率100%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的上下表面的间距为d,有:
q[U/d]=qvB
电流的微观表达式为:
I=nqvS
联立解得:
U=[BdI/nqS] ①
A、由①式,U∝I;增加电流时,元件上、下表面产生的电势差变化得快;故A正确;
B、C、D、由①式,U∝B;霍尔元件沿x轴正方向以速度v匀速运动,要使元件上、下表面产生的电势差变化得快,则需要磁感应强度变化加快;由于B=B0+kx,根据可以通过增加k或v来使元件上、下表面产生的电势差变化得快;故B错误,C错误,D错误;
故选:A.点评:
本题考点: 霍尔效应及其应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
- 磁电式电子点火系统和霍尔式电子点火系统有什么区别?
新雨rain1年前1
-
xsha 共回答了18个问题
|采纳率83.3%两者都是产生电压脉冲的.磁感应试应用的是磁场的互感原理在信号线中感应出脉冲信号,传递给点火模块,放大、虑波…到点火线圈.而霍尔试的是应用了霍尔效应,即改变一个磁场的大小引起磁场中通电部分的电压变化.直观上不同的就是前者两根线后者三根线1年前查看全部
- 电磁脉冲式和霍尔式曲轴位置传感器检测时的最大区别是什么?
利刀文1年前1
-
qq爱17 共回答了15个问题
|采纳率86.7%简单的说,我所了解其两者基本差不多,都是通过电脉冲来实现数据传输,霍尔式依然是通过元件在磁钢的驱动下产生电信号,从而达到测量的功能,最大的区别我认为就是使用霍尔的传感器的精度更高一点,无论抗干扰能力还是其他的各个方面磁电式霍尔的能力都回略省一筹.1年前查看全部
- 磁电式电子点火系统和霍尔式电子点火系统有什么区别
angeljoy1年前1
-
wwz2006 共回答了20个问题
|采纳率100%两者都是产生电压脉冲的.磁感应试应用的是磁场的互感原理在信号线中感应出脉冲信号,传递给点火模块,放大、虑波…到点火线圈.而霍尔试的是应用了霍尔效应,即改变一个磁场的大小引起磁场中通电部分的电压变化.直观上不同的就是前者两根线后者三根线1年前查看全部
- (2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、
 (2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )
(2014•海淀区二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )
A.磁感应强度B越大,上、下表面的电势差U越大
B.霍尔元件运动的速度越大,上、下表面的电势差越大
C.若图中霍尔元件是电子导电,则下板电势高
D.电流I取值越大,上、下表面的电势差U越小风中舞云里游1年前1 -
草色琉璃 共回答了21个问题
|采纳率95.2%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.C、电流向右、磁场向外,根据左手定则,安培力向下;电流是电子的定向移动形成的,故洛伦兹力也向下;故下极板聚集负电荷,上极板带正电荷,故下极板电势较低;故C错误;
A、B、D、设上下表面高度差为h,厚度为d,电子最终达到平衡,有:
evB=e[U/h]
则:U=vBh
电流的微观表达式:
I=nevS=nevhd
则:v=[I/nehd],代入得:
U=[I/nehd]Bh=[BI/ned]∝[BI/d]
磁感应强度B越大,上、下表面的电势差U越大,故A正确;
上、下表面的电势差与速度无关,故B错误;
D、电流I取值越大,上、下表面的电势差U越大;故D错误;
故选:A.点评:
本题考点: 霍尔效应及其应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
- (2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k
 (2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )
(2011•南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )
A.磁感应强度B越大,上、下表面的电势差U越大
B.k越大,传感器灵敏度([△U/△z])越高
C.若图中霍尔元件是电子导电,则下板电势高
D.电流I取值越大,上、下表面的电势差U越小tinalpha211年前1 -
lemon_amy 共回答了16个问题
|采纳率100%解题思路:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.A、最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的长宽高分别为a、b、c,有q
U
c=qvB,电流的微观表达式为I=nqvS=nqvbc,所以U=[BI/nqb].B越大,上、下表面的电势差U越大.电流越大,上、下表面的电势差U越大.故A正确,D错误.
B、k越大,根据磁感应强度B=B0+kz,知B随z的变化越大,根据U=[BI/nqb].知,U随z的变化越大,即传感器灵敏度([△U/△z])越高.故B正确.
C、霍尔元件中移动的是自由电子,根据左手定则,电子向下表面偏转,所以上表面电势高.故C错误.
故选AB.点评:
本题考点: 霍尔效应及其应用.
考点点评: 解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.1年前查看全部
大家在问
- 1证明:任何一个奇数的平方都能写成8n-1(n是整数)
- 2跪求一篇介绍历史人物的英文文章英文的,中外都行,100~200字.稍微简单一点的.
- 3自点A(-1,4)作圆(X-2)平方+(y-3)平方=1的切线,(1)求切线方程(2)A与切点间的切线长
- 47个人3小时割了73.5千克草,照这样计算,全班48人用同样时间割草多少千克?
- 5(2013•南充)在反应2A+5B═2C+4D中,C、D的相对分子质量之比为9:22.若1.3gA与一定量的B恰好完全反
- 6LAC是哪个队
- 7不等式习题求解!1.如果不等式x/2+a≥2的解集是x≥0,那么a的值为?2.关于x的不等式x-a>2的解集是x>1,则
- 8秋天的怀念这一课的主要内容是什么?
- 9求一道百思不得其解的题~求 |x|-1=根号下的1-(y-1)^2(用^2表示平方)这个曲线所表示的图形?A.两个半圆B
- 10在一幅长8分米,宽6分米的矩形风景画的四周镶上宽度相同的金色纸边,
- 11下列物质的说法不正确的是( )
- 12what do you think of his suggestion we all attend the meetin
- 136x-4y=8 3x-4y=5 用加减消元法,要过程!
- 14计算分析题 61. XYZ公司2008年10月31日银行存款日记账为70000元,银行对账单的存款余额数为73150元,
- 15NA代表阿伏加德罗常数.下列说法中,正确的是( )