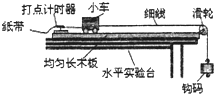
将力传感器A固定在光滑水平桌面上,测力端通过轻质水平细绳与滑块相连,滑块放在较长的小车上.如图甲所示,传感器与计算机相连
 johefung2022-10-04 11:39:543条回答
johefung2022-10-04 11:39:543条回答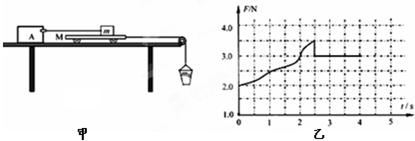
A. 2.5s前小车做变加速运动
B. 2.5s后小车做变加速运动
C. 2.5s前小车所受摩擦力不变
D. 2.5s后小车所受摩擦力不变
已提交,审核后显示!提交回复
共3条回复
 郭卫佳 共回答了21个问题
郭卫佳 共回答了21个问题 |采纳率90.5%- 解题思路:对滑块进行受力分析,由图象求出传感器对滑块的拉力,由平衡条件求出滑块受到的摩擦力,然后由牛顿第三定律判断小车的受力情况.
根据图象可知,2.5秒之后传感器拉力不变,说明此时小车开始运动,传感器拉力大小等于滑动摩擦力大小,因此2.5秒后小车所受摩擦力不变,由于沙桶质量不端增加,即重力不变增加,因此2.5s后小车做变加速运动,2.5秒之前小车静止不动,小车所受摩擦力为静摩擦力,大小不断增大,故AC错误,BD正确.
故选BD.点评:
本题考点: 验证牛顿第二运动定律.
考点点评: 本题难度不大,对滑块正确受力分析、应用牛顿的三定律即可正确解题,由图乙所示图象求出传感器拉力大小是正确解题的关键. - 1年前
- karry813 共回答了3个问题
|采纳率 - 传感器测的是摩擦力,50秒之前是静摩擦,随着沙子的增多而增大,跟砂子重量相等,最大静摩擦力要大于滑动摩擦力,50秒之后是滑动摩擦,只与压力和接触面粗糙程度有关,基本不变。2.5秒后开始向桶中加沙子,砂子重量是变力,所以变加速运动。后面的物体速度小于前面物体速度时会分离,跟加速度无关...
- 1年前
- frankwang131 共回答了1个问题
|采纳率 - 根据图象可知,2.5秒之后传感器拉力不变,说明此时小车开始运动,传感器拉力大小等于滑动摩擦力大小,因此2.5秒后小车所受摩擦力不变,由于沙桶质量不断增加,即重力不断增加,因此2.5s后小车做变加速运动。
2.5秒之前小车静止不动,小车所受摩擦力为静摩擦力,大小不断增大,故AC错误,BD正确.
你的问题,A.小车受力,有向前滑动的趋势,...
- 1年前
相关推荐
- 力传感器在冲量测量中的应用(气垫导轨、A|D变换及数据采集系统……)
力传感器在冲量测量中的应用(气垫导轨、A|D变换及数据采集系统……)
1.实验估测知道碰撞发生的持续时间约为5ms,电荷放大器输出电压的变化范围在2.5v量级,如果要求碰撞过程采样点数不少于500,应当怎样选择瞬态记录装置的采样率和系统放大倍数(A/D芯片的动态范围为±2.5v,系统增益由0.5可调且按1—2—5的比例设置) 触发方式和提前量如何考虑?
2.已知力传感器的灵敏度So=4.0OPC/N,系统输出灵敏度G=O.1V/PC,瞬态采集板的分辨率为8bit,动态范围Vmax=10V,碰撞发生前的读数为245,碰撞时的最小读数为20,试由此算出碰撞的最大冲力.
3.用什么方法从计算机存储的数据序列中提取碰撞发生的时间,最大冲力,冲量和平均冲力.东北大米好吃1年前1 -
sadzhen 共回答了20个问题
|采纳率100%楼主,好乱哦.我一点点的搂一下吧.
碰撞时间为5ms,碰撞采样点数为500,那就是说,数采的采样频率不低于100kHz,8位的采集卡是达不到100kHz的采样频率的,应采用24位的数采产品.
力传感器灵敏度是4OPC/N,我不是很清楚这个OPC是什么单位,如果就是4PC/N的话,那么系统的校正因子就是0.4V/N,这个指标太大了,因此我认为有问题.也就是说,只要输入25N的力,系统就超量程了.问题应该是这个系统输出灵敏度G=0.1V/PC这里,这个灵敏度楼主你再确认一下究竟是多少,0.1V/PC太大了.
大概先说这么多,你这个问题我比较有兴趣.1年前查看全部
- 如图,用DIS实验系统做验证牛顿第三定律的实验时,把两个力传感器的挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的结
 如图,用DIS实验系统做验证牛顿第三定律的实验时,把两个力传感器的挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的结果,.观察分析两个力传感器的相互作用力随时间变化的曲线,可以得到以下实验结论.
如图,用DIS实验系统做验证牛顿第三定律的实验时,把两个力传感器的挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的结果,.观察分析两个力传感器的相互作用力随时间变化的曲线,可以得到以下实验结论.
A.作用力与反作用力性质相同
B.作用力与反作用力作用在同一物体上
C.作用力与反作用力大小同时变化
D.作用力与反作用力作用在一条直线上我爱安达充19431年前1 -
creese_fu 共回答了20个问题
|采纳率100%解题思路:用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.A、两个力传感器的之间的力都是弹力,力的性质相同,故A正确;
B、两个力传感器的之间的力作用在两个力传感器上,不是作用在同一个物体上,故B错误;
C、任意时刻,两个力传感器的之间的力都是大小相等,故大小同时变化,故C正确;
D、两个力传感器在一条直线上,故作用力与反作用力作用在一条直线上,故D正确;
故选ACD.点评:
本题考点: 牛顿第三定律.
考点点评: 解决本题的关键知道作用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.1年前查看全部
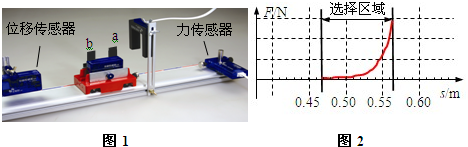
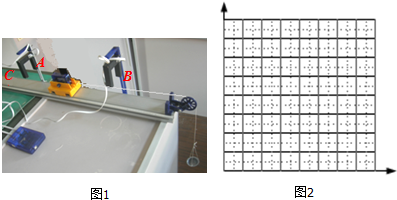
- 某探究学习小组的同学利用光电门与力传感器来验证“牛顿第二定律”,他们在实验室组装了一套如图1所示的装置,气垫导轨上安装两
某探究学习小组的同学利用光电门与力传感器来验证“牛顿第二定律”,他们在实验室组装了一套如图1所示的装置,气垫导轨上安装两个电光门,小车上固定有力传感器和挡光板,细线一端与力传感器连接,另一端跨过定滑轮挂上砝码盘,实验首先保持轨道水平,再进行后面的相关操作,并在实验中获得以下测量数据:小车、力传感器和挡光板的总质量为M,挡光板的宽度d,光电门1和2中心的距离s,某将实验过程中,力传感器的读数为F,小车通过光电门1和2的挡光时间分别为t 1 、t 2 ,且小车通过光电门2后,砝码盘才落地: 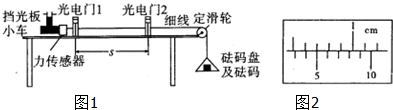
(1)关于该实验中砝码和砝码盘的总质量与小车的质量关系及误差,下列分析正确的是______
A.当砝码和砝码盘的总质量远小于车的质量,实验才能成功
B.本实验中应该用砝码和砝码盘的总重力代替小车的合外力
C.由于用到了力传感器,则无需砝码和砝码盘的总质量远小于车的质量
D.可近似用力传感器的示数当作小车的合外力来进行验证
(2)实验需用游标卡尺测量挡光板的宽度d,如图2所示,用10分度的游标卡尺测出挡光板的宽度d=______mm;
(3)该实验需要验证的表达式为______.517tibet1年前1 -
彤儿菲菲 共回答了21个问题
|采纳率95.2%(1)该实验中由于已经用传感器测出绳子拉力大小,不是将砝码和砝码盘的重力作为小车的拉力,而是用力传感器的示数当作小车的合外力,故不需要满足砝码和砝码盘的总质量远小于小车的质量,故CD正确,AB错误.
故选:CD
(2)根据图2可可以推出,游标0刻度在2-3mm之间,则
游标卡尺的主尺读数为2mm,游标读数等于0.1×5mm=0.5mm,所以最终读数为:2mm+0.5mm=2.5mm.
(3)由于光电门的宽度d很小,所以我们用很短时间内的平均速度代替瞬时速度.
滑块通过光电门1速度为: v 1 =
d
t 1
滑块通过光电门2速度为: v 2 =
d
t 2
根据 v 2 2 - v 1 2 =2as 得:
a=
v 2 2 - v 1 2
2a ,
由F=Ma可知,F=M
v 2 2 - v 1 2
2a =M
(
d
t 2 ) 2 -(
d
t 1 ) 2
2s
故答案为:(1)CD;(2)2.5;(3)F= M
(
d
t 2 ) 2 -(
d
t 1 ) 2
2s1年前查看全部
- 如图1所示,“验证变力做功的动能定理”的实验装置放置在水平桌面上,两块磁铁分别安装于力传感器和小车对应位置,且同性磁极相
如图1所示,“验证变力做功的动能定理”的实验装置放置在水平桌面上,两块磁铁分别安装于力传感器和小车对应位置,且同性磁极相对,两挡光片宽均为1cm.
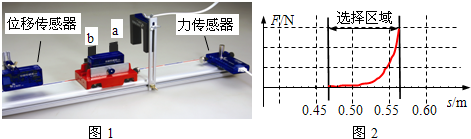
(1)让小车向力传感器方向运动,挡光片a经过光电门传感器时测得此时小车速度v0,同时触发力传感器以及位移传感器工作,磁力对小车做______功(选填“正”或“负”),挡光片b(a、b间距为5cm)经过光电门时再次测得此时小车的速度vt,同时(实际有一定延时)触发传感器停止工作.
(2)计算机上显示出F-s图象,计算出______即为此过程变力做功W.
(3)某同学测得小车及车上传感器、磁铁等总质量m=0.180kg,v0=0.341m/s,vt=0.301m/s,则小车动能的变化量△Ek=______J,他选取如图2所示的选择区域后,计算机自动计算出变力做功W,发现W与△Ek相差较大,其主要原因是______.
天地人2281年前0 -
共回答了个问题
|采纳率
- 利用如图所示的装置可以做力学中的一些实验,交流电的频率为f,小车及及力传感器的总质量为M,钩码质量为m,细线的拉力F由力
 利用如图所示的装置可以做力学中的一些实验,交流电的频率为f,小车及及力传感器的总质量为M,钩码质量为m,细线的拉力F由力传感器读出.利用该装置进行实验时,以下说法正确的是( )
利用如图所示的装置可以做力学中的一些实验,交流电的频率为f,小车及及力传感器的总质量为M,钩码质量为m,细线的拉力F由力传感器读出.利用该装置进行实验时,以下说法正确的是( )
A.“研究匀变速直线运动”的实验中,应该先平衡摩擦力再进行实验
B.“探究物体的加速度与力关系”时,应该满足的条件是M远大于m
C.“探究物体的加速度与力的关系”时,可以通过图象法处理数据,画出a-F关系图象即可确定加速度与力的关系
D.“探究功与速度变化的关系”时,木板左端被垫起一些,使小车在不受拉力作用时做匀速直线运动,这样做的目的是补偿阻力,用细绳的拉力来替代小车的合外力es351年前1 -
mcz321 共回答了16个问题
|采纳率100%解题思路:“研究匀变速直线运动”的实验中,不需要先平衡摩擦力再进行实验,只要满足小车做匀加速直线运动就可以呢.
该实验装置中拉力F由力传感器读出,不需要M远大于m,即不需要用钩码的重力大小代替小车的合力.
“探究物体的加速度与力的关系”时,可以通过图象法处理数据,画出a-F关系图象即可确定加速度与力的关系.
探究“功与速度变化的关系”实验时,需要平衡摩擦力.A、“研究匀变速直线运动”的实验中,不需要先平衡摩擦力再进行实验,只要满足小车做匀加速直线运动就可以呢.故A错误;
B、根据实验原理可知,在该实验中用传感器直接测出了小车所受拉力大小,因此对小车质量和所挂钩码质量没有具体要求,故B错误;
C、“探究物体的加速度与力的关系”时,可以通过图象法处理数据,画出a-F关系图象即可确定加速度与力的关系,故C正确;
D、在利用该装置来做“探究功与速度变化的关系”实验前,木板左端被垫起一些,使小车在不受拉力作用时做匀速直线运动,这样做的目的是为了补偿阻力,用细绳的拉力来替代小车的合外力.故D正确;
故选:CD.点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 该题涉及的实验比较多,不管是考查什么实验,首先要找到实验原理,我们就可以根据实验原理找需要的实验仪器,然后可以讨论得出相应结论..1年前查看全部
- (2012•浦东新区二模)某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线
 (2012•浦东新区二模)某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
(2012•浦东新区二模)某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为______;次数 M/kg |v22-v12|/m2s-2 △E/J F/N W/J 1 0.500 0.760 0.190 0.400 0.200 2 0.500 1.65 0.413 0.840 0.420 3 0.500 2.40 △E3 1.22 W3 4 1.00 2.40 1.20 2.42 1.21 5 1.00 2.84 1.42 2.86 1.43
③改变小车的质量或重物的质量,重复②的操作.
(2)右侧表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=______,W3=______(结果保留三位有效数字).cytt8881年前1 -
水乡一族 共回答了20个问题
|采纳率80%解题思路:要探究动能定理就需要求出力对小车做的总功和小车动能的变化,这就要求必须知道小车发生的位移即两光电门间距离.(1)根据动能定理知因要求总功必须已知小车位移,故除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L.
(2)由△E=[1/2]M
v22-[1/2]M
v21得
△E 3=[1/2]×0.500×2.40=0.600J,根据表中数据由功公式W=FL,可求出两光电门间距离L=[W/F]=0.5Kg,所以
W 3=
F 3.L=1.22×0.5J=0.610J.
故答案为(1)两光电门间的距离L
(2)0.600J,0.610J点评:
本题考点: 探究功与速度变化的关系.
考点点评: 做实验题时应先根据实验原理写出有关公式再讨论即可.1年前查看全部
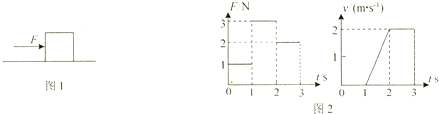
- (2011•嘉定区一模)某同学利用如图装置研究外力与加速度的关系.将力传感器安装在置于光滑水平轨道的小车上,通过细绳绕过
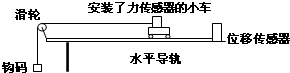 (2011•嘉定区一模)某同学利用如图装置研究外力与加速度的关系.将力传感器安装在置于光滑水平轨道的小车上,通过细绳绕过光滑定滑轮悬挂钩码.开始实验后,依次按照如下步骤操作:
(2011•嘉定区一模)某同学利用如图装置研究外力与加速度的关系.将力传感器安装在置于光滑水平轨道的小车上,通过细绳绕过光滑定滑轮悬挂钩码.开始实验后,依次按照如下步骤操作:
①同时打开力传感器和位移传感器;
②释放小车;
③关闭传感器,根据F-t,v-t图象记录下绳子拉力F和小车加速度a.
④重复上述步骤.
(1)某次释放小车后得到的F-t,v-t图象如图所示.根据图象,此次操作应记录下的外力F大小为______N,加速度a为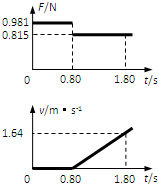 ______m/s2.(保留2位有效数字)
______m/s2.(保留2位有效数字)
(2)(单选题)利用上述器材和过程得到多组数据数据作出a-F图象,为一直线,则
(A)理论上直线斜率应等于小车质量
(B)直线不过原点可能是因为轨道没有调整到水平
(C)如果小车受到来自水平轨道的恒定阻力,直线斜率会变小
(D)若实验中钩码质量较大,图象可能会呈现一条曲线.糖饯1年前1 -
yitiao6688 共回答了10个问题
|采纳率90%解题思路:了解该实验装置,知道实验过程中小车的运动情况.根据F-t,v-t图象求出F大小和a的大小.(1)根据v-t图象得到0.8s前小车是静止的,0.8s后小车做匀加速运动.
所以此次操作应记录下的外力F大小为0.82N,
根据v-t图象的斜率求出加速度a=[△v/△t]=1.6m/s2.
(2)A、由于a=[F/m],根据a-F图象知道理论上直线斜率应等于小车质量的倒数,故A错误.
B、直线不过原点可能是因为轨道没有调整到水平,重力沿轨道方向有分力,故B正确.
C、如果小车受到来自水平轨道的恒定阻力,那么a=[F−f/m],f为阻力,那么a-F图象知道直线斜率不变,变的是图形不过原点,故C错误.
D、若实验中钩码质量较大,不影响力传感器测量绳子对小车的拉力,所以图象仍然是直线,故D错误.
故选B.
故答案为:(1)0.82;1.6
(2)B.点评:
本题考点: 测定匀变速直线运动的加速度.
考点点评: 解决实验问题首先要掌握该实验原理,了解实验的操作步骤和数据处理以及注意事项.通过作图法研究两个变量之间的关系是物理里常用的一种手段,只有直线图形可以清楚地说明两变量之间的关系.1年前查看全部
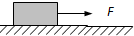
- 某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力
 某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力F,并用另外一个传感器对木块的运动状态进行监测,表是其记录的实验数据.木块的重力为10.00N,重力加速度g=9.80m/s2,根据表格中的数据回答下列问题(答案保留3位有效数字):
某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力F,并用另外一个传感器对木块的运动状态进行监测,表是其记录的实验数据.木块的重力为10.00N,重力加速度g=9.80m/s2,根据表格中的数据回答下列问题(答案保留3位有效数字):
(1)木块与桌面间的动摩擦因数μ=______;实验次数 运动状态 水平拉力N 1 静止 3.62 2 静止 4.00 3 匀速 4.01 4 匀加速 5.01 5 匀加速 5.49
(2)实验次数5中监测到的加速度α=______m/s2.sjcstc1年前1 -
生在大别山 共回答了14个问题
|采纳率92.9%解题思路:(1)水平力作用下物体匀速运动时,所受滑动摩擦力等于水平拉力,物体在水平力作用下沿水平面运动时,FN=mg,Ff=F=FNμ由此可求出滑动摩擦因数大小;
(2)根据牛顿第二定律列方程可以求出物体的加速度大小.(1)当物体在水平拉力作用下匀速运动时,拉力大小等于滑动摩擦力大小,物体所受滑动摩擦力为:Ff=4.01N,
滑动摩擦力为:Ff=FNμ…①
FN=mg…②
联立①②,解得:μ=
Ff
mg=0.401.
(2)根据牛顿第二定律有:
F5-Ff=ma,
带入数据解得:a=1.45m/s2.
故答案为:(1)0.401;(2)1.45.点评:
本题考点: 探究影响摩擦力的大小的因素.
考点点评: 滑动摩擦力大小跟压力大小、接触面粗糙程度有关,跟物体受到的拉力大小、物体的运动速度都没有关系,正确根据物体所处状态列方程求解.1年前查看全部
- 阅读短文,回答问题:力传感器在电子秤中的应用电子秤所使用的测力装置是力传感器.常见的一种力传感器由弹簧钢和应变片组成,其
阅读短文,回答问题:
力传感器在电子秤中的应用电子秤所使用的测力装置是力传感器.常见的一种力传感器由弹簧钢和应变片组成,其结构示意图如图甲所示.弹簧钢右端固定,在其上、下表面各贴一个相同的应变片.若在弹簧钢的自由端施加向下的作用力F,则弹簧钢发生弯曲,上应变片被拉伸,下应变片被压缩.力越大,弹簧钢的弯曲程度越大.应变片结构如图乙所示,其中金属电阻丝的阻值对长度变化很敏感.给上、下金属电阻丝提供相等且大小不变的电流,上应变片两引线间电压为U1,下应变片两引线间电压为U2,传感器把这两个电压的差值U(U=U1-U2)输出,用来反映力F的大小.金属电阻丝的阻值随温度会发生变化,其变化情况如图丙所示.为消除气温变化对测量精度的影响,需分别在上、下应变片金属电阻丝与引线之间串联一只合适的电阻,进行温度补偿.串联合适的电阻后,测量结果不再受温度影响.
(1)这种力传感器是将力的大小转换为______(电流/电压)的装置.
(2)外力F增大时,下列说法正确的是______.
A.上、下应变片金属电阻丝电阻都增大
B.上、下应变片金属电阻丝电阻都减小
C.上应变片金属电阻丝电阻减小,下应变片金属电阻丝电阻增大
D.上应变片金属电阻丝电阻增大,下应变片金属电阻丝电阻减小
(3)传感器输出的电压U随外力F增大而______.
(4)进行温度补偿时,应给上金属电阻丝串联阻值随温度升高而______的电阻,下金属电阻丝串联阻值随温度升高而______的电阻.
(5)如果未进行温度补偿,自由端受到相同的力F作用,该传感器下应变片两端的电压U2冬天比夏天______(大/小).生就是KING1年前1 -
浪迹ffqaw 共回答了25个问题
|采纳率92%解题思路:(1)从题目所给信息中可知,传感器传输的是电压的差值,用电压的差值来反映力F的大小.
(2)外力F增大时,上应变片被拉伸,下应变片被压缩,应变片长度发生变化,可知电阻的变化.
(3)传感器输出的电压表示力F的大小,压力越大电子秤示数越大,也就是输出的电压越大.
(4)由图丙可知,金属电阻丝的阻值随温度的增大而增大,所以串联的电阻应该是随着温度的升高而减低的电阻.
(5)冬天温度低,电阻受温度的影响比夏天小,所以电阻增加的小.(1)传感器把两个电压的差值输出,用来反映力F的大小,所以这种力传感器是将力的大小转换为电压的装置.
(2)外力F增大时,上应变片金属电阻丝长度变大,电阻变大,下应变片金属电阻丝长度变短,电阻变小.
故选D.
(3)压力越大电子秤示数越大,也就是输出的电压越大,所以说传感器输出的电压U随外力F增大而增大.
(4)未进行温度补偿时,金属电阻丝的阻值随温度的增大而增大,所以串联的电阻应该是随着温度的升高而减小的电阻.
(5)冬天比夏天电阻增加的小,所以该传感器下应变片两端的电压U2冬天比夏天小.
故答案为:(1)电压;(3)增大;(4)减小;减小;(5)小.点评:
本题考点: 欧姆定律的应用;影响电阻大小的因素.
考点点评: 本题考查欧姆定律的应用和影响电阻大小的因素,关键知道影响电阻大小的因素是导体的材料、长度、横截面积和温度,难点是根据题目所给信息结合我们所学知识解题.1年前查看全部
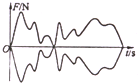
- 某同学用传感器来探究摩擦力,他将力传感器接入数据采集器,再连接到计算机上; 将一质量m=3.75kg的木块置于
某同学用传感器来探究摩擦力,他将力传感器接入数据采集器,再连接到计算机上; 将一质量m=3.75kg的木块置于水平桌面上,用细绳将木块和传感器连接起来进行数据采集,然后沿水平方向缓慢地拉动传感器,至木块运动一段时间后停止拉动.获得的数据在计算机上显示出如图所示的图象.下列有关这个实验的几个说法,其中正确的是( ) A.0~6s内木块一直受到静摩擦力的作用 B.最大静摩擦力比滑动摩擦力大 C.木块与桌面间的动摩擦因数约为0.08 D.木块与桌面间的动摩擦因数约为0.11 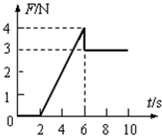 背向我已天崖1年前1
背向我已天崖1年前1 -
jinshu471 共回答了12个问题
|采纳率91.7%A、在0-2s内,物体不受外力,此时没有摩擦力,故A错误;
B、由图象可知,用力沿水平方向拉长木板,拉力从0开始逐渐增大.刚开始长木板处于静止状态,长木板受拉力和木块对长木板间的静摩擦力,当拉力达到4N时,开始发生相对滑动,木块与长木板间产生了滑动摩擦力.由图可知木块与长木板间的最大静摩擦力F fm 为4N.当拉力达到4N时,开始发生相对滑动,木块与长木板间产生了滑动摩擦力.由图可知木块与长木板间的滑动摩擦力F f 为3N.故B正确;
C、根据滑动摩擦力公式得:
μ=
f
F N =
3
37.5 =0.08,故C正确,D错误;
故选BC1年前查看全部
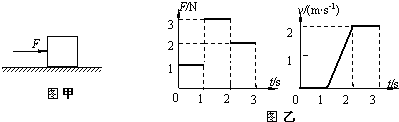
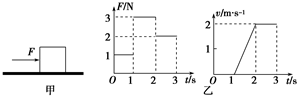
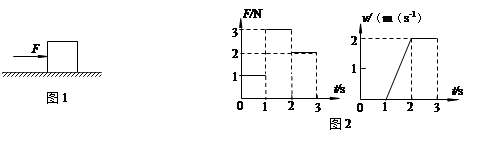
- 如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动。通过力传感器和速度传感器监测到推力F、物体速度v随时间t变
如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动。通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图乙所示。取g=l0m/s 2 ,则 
 [ ]
[ ]A.物体的质量m=1.0kg
B.物体与水平面间的动摩擦因数μ=0.20
C.第2s内物体克服摩擦力做的功W=2.0J
D.前2s内推力F做功的平均功率P=1.5W冰雹1231年前1 -
鱼儿吐泡泡 共回答了20个问题
|采纳率90%CD1年前查看全部
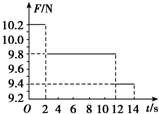
- 在电梯中,把一重物置于台秤上,台秤与力传感器相连,电梯从静止加速上升,然后又匀速运动一段时间,最后减速直至停止运动.在此
在电梯中,把一重物置于台秤上,台秤与力传感器相连,电梯从静止加速上升,然后又匀速运动一段时间,最后减速直至停止运动.在此过程中传感器的屏幕上显示出其所受压力与时间关系的图象如下图所示,则( )
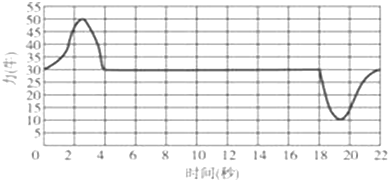
A.电梯在启动阶段约经历了2.5秒的加速上升过程
B.电梯在启动阶段约经历了3.5秒的加速上升过程
C.电梯的最大加速度约为6.7m/s2
D.电梯的最大加速度约为16.7m/s2lmokch1年前1 -
快乐大侠 共回答了15个问题
|采纳率93.3%解题思路:电梯加速上升时,重物对台秤的压力大于重力.由图象可知:电梯在启动阶段经历了4.0s加速上升过程.
当重物的合力最大时,加速度最大,此时重物对台秤的压力最大.由图可知:4-18s内电梯做匀速直线运动,压力大小等于重力,求出质量.当压力N=50N时,重物的合力最大,由牛顿第二定律求出加速度.A、B、在0-4s内重物对台秤的压力大于重力,由牛顿第二定律得加速度方向向上,电梯加速上升,即电梯在启动阶段约经历了4秒的加速上升过程.故A错误,B错误;
C、D、在0-4s内,压力N=50N,由牛顿第二定律有:
N-mg=ma,解得:a=
50−30
m=
20
3m/s2=6.7m/s2
在4s-18s内,压力N=10N,由牛顿第二定律有:
mg-N-=ma′,
解得:a′=
30−10
m=
20
3m/s2=6.7m/s2.故C正确,D错误;
故选:C点评:
本题考点: 牛顿运动定律的应用-超重和失重.
考点点评: 本题考查读图的能力,关键抓住产生超重和失重现象时,重物对台秤的压力与重力的关系.1年前查看全部
- 如图1,“验证变力做功的动能定理”的实验装置放置在水平桌面上,两块磁铁分别安装于力传感器和小车对应位置,且同性磁极相对,
如图1,“验证变力做功的动能定理”的实验装置放置在水平桌面上,两块磁铁分别安装于力传感器和小车对应位置,且同性磁极相对,两挡光片宽均为1cm.
(1)让小车向力传感器方向运动,挡光片a经过光电门传感器时测得此时小车速度v0,同时触发力传感器以及位移传感器工作,磁力对小车做______功(选填“正”或“负”),挡光片b(a、b间距为5cm)经过光电门时再次测得此时小车的速度vt,同时(实际有一定延时)触发传感器停止工作.
(2)计算机上显示出F-s图象,图象中的______即为此过程变力做功W.
(3)某同学测得小车及车上传感器、磁铁等总质量m=0.180kg,v0=0.341m/s,vt=0.301m/s,则小车动能的变化量△Ek=______J(保留两位有效数字),他选取如图2所示的选择区域后,计算机自动计算出变力做功W,发现W与△Ek相差较大,其主要原因是______.cqcakyw1年前1 -
哼哼猫毛毛狗 共回答了16个问题
|采纳率87.5%解题思路:(1)两块磁铁分别安装于力传感器和小车对应位置,且同性磁极相对,互相排斥,磁力对小车做负功.(2)F-s图象中,图线与坐标轴围成的面积表示变力做功.(3)因为△Ek=12mvt2-12mv02,代入数据计算可得小车动能的变化量.(1)同性磁极相对,互相排斥,故磁力对小车做负功.
(2)F-s图象中,图线与坐标轴围成的面积表示功,所以估算图线下方的面积,其大小即为磁力在这一过程所做功大小.
(3)因为△Ek=[1/2]mvt2-[1/2]mv02,
代入数据得:△Ek=[1/2]×0.180×0.3012-[1/2]×0.180×0.3412=-0.0023(J)
估算图线下方的面积,其大小即为磁力在这一过程所做功大小,如果选择的区域过大或过小,都会导致W与△Ek相差较大.
故答案为:(1)负;(2)图线包围的面积;(3)-0.0023,选择区域过大点评:
本题考点: 探究功与速度变化的关系.
考点点评: 本题要了解光电门测量瞬时速度的原理,实验中我们要清楚研究对象和研究过程,对于系统我们要考虑全面,同时明确实验原理是解答实验问题的前提,注意图象面积的意义.1年前查看全部
- (她007•南京二模)将力传感器连接到计算机少就可以测量迅速变化0力0大小.在图甲所示0装置左,可视为质点0小滑块沿固定
(她007•南京二模)将力传感器连接到计算机少就可以测量迅速变化0力0大小.在图甲所示0装置左,可视为质点0小滑块沿固定0光滑半球形容器内壁在竖直平面0A四之间往复运动,OA、O四与竖直方向之间0夹角相等且都为θ(θ<七0°).某次实验,用力传感器测得滑块对器壁0压力大小F随时间t变化0曲线如图乙所示,图左t=0时,滑块从A点开始运动.试根据力学规律和题左(包括图左)所给出0信息.求:
(七)压力大小F随时间t变化0周期与小滑块运动0周期之比;
(她)容器0半径和小滑块0质量;
(口)小滑块运动过程左0最大动能.
(g取七0m/s她)音乐的耳朵1年前1 -
泛舟8690 共回答了21个问题
|采纳率85.7%解题思路:(1)通过图象得出压力大小随时间变化的周期,滑块的周期是压力变化周期的2倍.(2)根据滑块的周期,结合单摆的周期公式求出 容器的半径.滑块在最低点对底部的压力最大,在最高点压力最小,且沿径向的合力为零,根据牛顿第二定律结合机械能守恒定律求出滑块的质量.(3)根据动能定理求出最大动能.(一)读着可0,压力大她F随时间t变化的周期T一=0.3πs.经判断知滑块运动的周期T一是压力大她变化周期T3的3倍,故T一T3=一3.(3)滑块在AB之间做类似于单摆的简谐运动,周期T3=0.4π s由T3=3πRg0,容...
点评:
本题考点: 动能定理的应用;牛顿第二定律;向心力.
考点点评: 本题综合考查了动能定理、机械能守恒定律、牛顿第二定律,以及考查学生的读图能力,综合性较强,是一道好题.1年前查看全部
- (2011•周口模拟)如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F
(2011•周口模拟)如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图乙所示.取重力加速度g=10m/s2,则( )
A.物体的质量m=1.0 kg
B.物体与水平面间的动摩擦因数μ=0.4
C.第2s内物体克服摩擦力做的功W=3.0 J
D.前2s内推力F做功的平均功率
=1.5 W.p 喜欢怎么了1年前1 -
寄千回 共回答了17个问题
|采纳率88.2%A、由速度时间图象可以知道在2-3s的时间内,物体匀速运动,处于受力平衡状态,所以滑动摩擦力的大小为2N,
在1-2s的时间内,物体做匀加速运动,直线的斜率代表加速度的大小,所以a=[2−0/1]=2m/s2,由牛顿第二定律可得F-f=ma,所以m=[F−f/a]=0.5kg,所以A错误;
B、由f=μFN=μmg,所以μ=[f/mg=
2
5]=0.4,所以B正确;
C、第二秒内物体的位移是x=[1/2at2=
1
2]×2×1=1m,摩擦力做的功W=fx=-2×1J=-2J,所以C错误;
D、在第一秒内物体没有运动,只在第二秒运动,F也只在第二秒做功,F的功为W=Fx=3×1J=3J,所以前2S内推力F做功的平均功率为
.
P=
W
t=
3
2W=1.5W,所以D正确.
故选BD.1年前查看全部
- 高一物理 对某题题目的疑惑如图a所示,楔形木块放在光滑水平地面上,力传感器受压时,其示数为正值;当力传感器被拉时,其示数
高一物理 对某题题目的疑惑
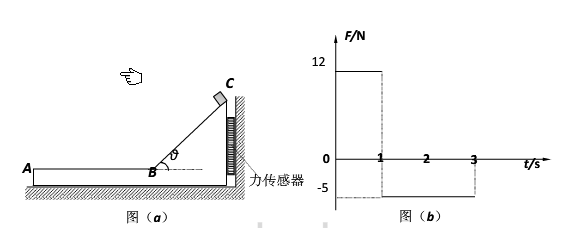
如图a所示,楔形木块放在光滑水平地面上,力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.BC段光滑,AB段粗糙,物由静止向下滑.
0~1s是物体在斜面上运动的时间,那为什么力传感器会被挤压?分解物体的加速度不应该是水平向左和向下么 即楔形收到向左的作用力即摩擦力么?那传感器应该被拉才对啊,是不是我的分析出错了
lcdpmgltrgi1年前4 -
zx鑫 共回答了17个问题
|采纳率94.1%有两种考虑思路
思路一:把物块C和楔形木块视为一个整体.物块C下滑时产生加速度分解为水平向左和竖直向下.因为有水平向左的分加速度,说明水平方向上物块和楔形木块的合力水平向左.此力从何而来?那是压力传感器对楔形木块的向左的推力.由牛顿第三定律可知,楔形木块向右压传感器.所以0—1s里为正值.(传感器被压)
思路二:对物块C进行分析(不分解加速度).因为楔形木块对物块C有支持力,所以物块C对楔形木块有压力.
对楔形木块进行分析.因为楔形木块静止,所以把压力分解成水平和竖直方向.楔形木块在水平方向只有向右的力,所以压在了里传感器上.
解题时要多作受力分析图.1年前查看全部
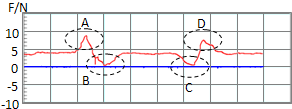
- 在用DIS做验证牛顿第三定律的实验过程中,用一辆电动玩具车A拖运另一辆无动力的玩具车B,在两车挂接处装上力传感器探头,并
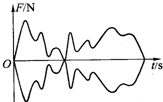
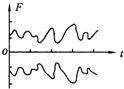 在用DIS做验证牛顿第三定律的实验过程中,用一辆电动玩具车A拖运另一辆无动力的玩具车B,在两车挂接处装上力传感器探头,并把它们的挂钩连在一起,A、B两车上的两个力传感器显示力分别为FA、FB.当电玩具汽车通电后拉着另一辆车向前运动时,可以在显示器屏幕上呈现两个力FA、FB随时间变化的图象,如图所示,观察分析曲线可以得出( )
在用DIS做验证牛顿第三定律的实验过程中,用一辆电动玩具车A拖运另一辆无动力的玩具车B,在两车挂接处装上力传感器探头,并把它们的挂钩连在一起,A、B两车上的两个力传感器显示力分别为FA、FB.当电玩具汽车通电后拉着另一辆车向前运动时,可以在显示器屏幕上呈现两个力FA、FB随时间变化的图象,如图所示,观察分析曲线可以得出( )
A.FA比FB大
B.FA与FB作用在同一物体上
C.FA与FB方向相同
D.FA与FB大小时刻相等zouxuejun1年前1 -
小二媳 共回答了16个问题
|采纳率75%解题思路:作用力与反作用力的关系是大小相等,方向相反,作用在同一条直线上,作用力与反作用力和一对平衡力最大的区别在于作用力与反作用力作用在两个不同的物体上,而一对平衡力是作用在同一个物体上的.由图象不难看出两个力的大小总是相等的,并且两个力的方向也是始终相反的,它们的变化的情况也是一样的;
作用力与反作用力是两个物体之间的相互作用,大小相等,方向相反.
故选:D.点评:
本题考点: 作用力和反作用力.
考点点评: 本题主要是考查作用力与反作用力的关系,同时注意区分它与一对平衡力的区别.1年前查看全部
- 如下图所示,弹簧被固定在右侧,弹簧左侧有一力传感器.
如下图所示,弹簧被固定在右侧,弹簧左侧有一力传感器.
现有一恒定的力F作用在传感器上并最终推动弹簧走了一段距离(弹簧并没有被压缩到极限位置).现在的问题是:力传感器上反映的力是力F还是弹簧的反作用力?
我想知道的是,在弹簧运动的过程中,力传感器上反映的力是力F还是弹簧的反作用力?这个反作用力是不是在弹簧运动的过程中都比力F要小?
另外,上面考虑的是力F恒定,假设力F是不断增大的,那么,在整个运动过程中,力传感器上所反映的力又是怎样的一种情况?
 撒野881年前1
撒野881年前1 -
红花绿野 共回答了17个问题
|采纳率88.2%如果弹簧不再移动,则传感器上反映的力既是力F也是弹簧的反作用力的大小.
又及:如果考虑运动过程中力的变化就要复杂的多,要考虑是加速、匀速或是减速运动,对应不同运动阶段力F与弹簧反作用力相比有大、相等或小的变化.1年前查看全部
- (2011•卢湾区模拟)一根轻绳一端系一小球,另一端固定在O点,在O点有一个能测量绳的拉力大小的力传感器,让小球绕O点在
 (2011•卢湾区模拟)一根轻绳一端系一小球,另一端固定在O点,在O点有一个能测量绳的拉力大小的力传感器,让小球绕O点在竖直平面内做简谐振动,由传感器测出拉力F随时间t的变化图象如图所示,下列判断正确的是( )
(2011•卢湾区模拟)一根轻绳一端系一小球,另一端固定在O点,在O点有一个能测量绳的拉力大小的力传感器,让小球绕O点在竖直平面内做简谐振动,由传感器测出拉力F随时间t的变化图象如图所示,下列判断正确的是( )
A.小球振动的周期为2s
B.小球速度变化的周期为4s
C.小球动能变化的周期为2s
D.小球重力势能变化的周期为4s平淡5211年前1 -
rukeyaa 共回答了16个问题
|采纳率81.3%解题思路:小球在竖直平面内做简谐运动,在最低点绳子的拉力和重力的合力提供向心力,此时拉力最大;在最大位移处,绳子的拉力等于重力的一个分力,此时拉力最小.根据在一次全振动中两次经过平衡位置,求出小球的周期.速度的变化的周期等于小球运动的周期.根据简谐运动经过半个周期运动到关于平衡位置对称的点,可求出小球动能的变化周期,以及重力势能的变化周期.A、小球运动的过程中在最低点拉力最大,最大位移处拉力最小,在一个周期内两次经过平衡位置,所以小球的周期为4s.故A错误.
B、小球的速度变化周期等于小球的点运动周期,等于4s.故B正确.
C、简谐运动经过半个周期运动到关于平衡位置对称的点,此时两点速度大小相等,方向相反,因为动能没有方向,所以动能的变化周期等于半个小球的周期,为2s.故C正确.
D、简谐运动经过半个周期运动到关于平衡位置对称的点,此时两点速度大小相等,方向相反,高度关于平衡位置对称,所以重力势能的变化周期为2s.故D错误.
故选BC.点评:
本题考点: 简谐运动的回复力和能量;简谐运动的振幅、周期和频率.
考点点评: 解决本题的关键知道简谐运动对称性,知道经过半个周期运动到关于平衡位置对称的点,此时速度大小相等,方向相反.1年前查看全部
- 某实验小组利用无线力传感器和光电门传感器探究“动能定理”。将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定
某实验小组利用无线力传感器和光电门传感器探究“动能定理”。将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物 G 相连,无线力传感器记录小车受到拉力的大小。在水平轨道上 A 、 B 两点各固定一个光电门传感器,用于测量小车的速度 v 1 和 v 2 ,如图所示。在小车上放置砝码来改变小车质量,用不同的重物 G 来改变拉力的大小。 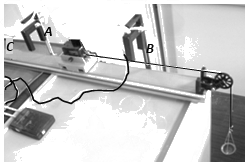
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量 M 1 。正确连接所需电路。调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力。将小车放置在导轨上,轻推小车,使之运动。可以通过 判断小车正好做匀速运动。
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物 G 相连;将小车停在点 C ,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为_________;
③改变小车的质量或重物的质量,重复②的操作。
(2)表格中 M 是 M 1 与小车中砝码质量之和,△ E 为动能变化量, F 是拉力传感器的拉力, W 是 F 在 A 、 B 间所做的功。表中的△ E 3 =__________J, W 3 =_________J(结果保留三位有效数字)。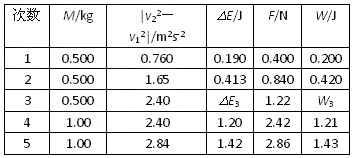 想飞翔的leo1年前1
想飞翔的leo1年前1 -
anan0919 共回答了13个问题
|采纳率100%(1)①小车经过两光电门的时间是否相等;②两光电门间的距离
(2)0.600;0.6101年前查看全部
- 某同学通过一个力传感器提着一个质量为1kg的手提包走进一个电梯,并把传感器连接在计算机上,从电梯开始运动为计时起点,到达
 某同学通过一个力传感器提着一个质量为1kg的手提包走进一个电梯,并把传感器连接在计算机上,从电梯开始运动为计时起点,到达某一楼层停止,通过计算机处理得到的力随时间变化的图象如图所示,下列判断正确的是( )
某同学通过一个力传感器提着一个质量为1kg的手提包走进一个电梯,并把传感器连接在计算机上,从电梯开始运动为计时起点,到达某一楼层停止,通过计算机处理得到的力随时间变化的图象如图所示,下列判断正确的是( )
A.电梯先加速向下运动,再匀速运动,最后减速运动
B.电梯运动的最大速度是20.4 m/s
C.电梯加速运动时的加速度大小大于减速运动时的加速度大小
D.电梯运动的位移是9.6 m酷酷的心情1年前1 -
zr_521 共回答了21个问题
|采纳率100%解题思路:电梯先由静到动,是加速;中途是匀速;最后是由动到静,是减速;根据牛顿第二定律求解加速度,根据运动学公式求解位移.A、电梯先由静到动,是加速;中途是匀速;最后是由动到静,是减速;
图象中开始是超重,故是加速上升;
故电梯先加速向上运动,再匀速运动,最后减速运动;故A错误;
B、C、加速阶段:F1-G=ma1
匀速阶段:F2-G=0
减速阶段:G-F3=ma3
解得:a1=a3=0.4m/s2
故最大速度为:v=at=0.4×2=0.8m/s
电梯加速运动时的加速度大小等于减速运动时的加速度大小;
故B错误,C错误;
D、电梯运动的位移是:
h=
v
2t1+vt2+
v
2t3=
0.8
2×2+0.8×10+
0.8
2×2=9.6m;故D正确;
故选:D.点评:
本题考点: 牛顿第二定律.
考点点评: 本题是根据受力情况确定运动情况,关键是先根据牛顿第二定律求解各个阶段的加速度,然后根据运动学公式分析,不难.1年前查看全部
- 将一个力传感器连接到计算机上,我们就可以测量快速变化的力。图中所示就是用这种方法测得的小滑块在半球形碗内在竖直平面内来回
将一个力传感器连接到计算机上,我们就可以测量快速变化的力。图中所示就是用这种方法测得的小滑块在半球形碗内在竖直平面内来回滑动时,对碗的压力大小随时间变化的曲线。从这条曲线提供的信息,可以判断滑块约每隔 秒经过碗底一次,随着时间的变化滑块对碗底的压力 (填“增大”、减小”、“不变”或“无法确定”)。
 螺丝起子791年前1
螺丝起子791年前1 -
心向往之0099 共回答了12个问题
|采纳率83.3%解题思路:当滑块滑动碗底时压力最大,所以从图中可得
T=06s 因为阻力的存在,滑块的速度越来越小,所以到最低点时对碗底的压力越来越小
0.6 减小
1年前查看全部
- (2009•上海二模)如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感
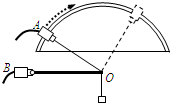 (2009•上海二模)如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
(2009•上海二模)如图所示,某小组同学利用DIS实验装置研究支架上力的分解A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂在一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述①②③④,得到图示表格a.
(1)根据表格a,A传感器对应的是表中力______(填“F1”或“F2”).钩码质量为______kg(保留1位有效数字).
(2)(单选题)本实验中多次对传感器进行调零,对此操作说明正确的是______
(3)某次操作中,有同学使用相同器材实验,但将传感器调零后再接上支架,其后按①③④步骤重复实验,得到图示表格b,则表格空缺处数据应接近______.A.因为事先忘记调零 B.何时调零对实验结果没有影响 C.为了消除横杆自身重力对结果的影响 D.可以完全消除实验的误差
表格a
表格bF1 1.001 0.580 … 1.002 … F2 -0.868 -0.291 … 0.865 … θ 30° 60° … 150° … F1 1.103 … F2 … … … θ 30° 60° … 自来红1年前1 -
kimiraikk 共回答了25个问题
|采纳率92%解题思路:(1)传感器在受到拉力时读数为正,受到压力时读数为负,A传感器读数为正,故为拉力,相当于F1,由节点O受力平衡,结合θ读数,可得钩码质量
(2)横杆自身重力会对实验结果造成影响,故应多次调零
(3)设杆的自重为G,利用θ的两个数值,结合钩码重力列方程解决问题(1)传感器在受到拉力时读数为正,A传感器读数为正,故为拉力,相当于F1;当θ=30°时,由节点O受力平衡可得,竖直方向F1sin30°=mg
故,m=
1.001×
1
2
10kg=0.05kg
(2)横杆自身重力会对实验结果造成影响,故应多次调零,故选C
(3)设杆自重为G,由节点O受力平衡可得:
(1.103-G)sin30°=0.05×10
(F′1-G)sin60°=0.05×10
解得:F′1=0.637N
故答案为:(1)F1,0.05(2)C(3)0.637(0.630~0.645之间均可)点评:
本题考点: 力的分解;力的合成的平行四边形定则.
考点点评: 解题的关键是首先根据题意灵活选取研究对象,然后再进行受力分析,列出方程求解即可1年前查看全部
- 阅读短文,回答问题: 力传感器在电子秤中的应用 电子秤所使用的测力装置是力传感器.
阅读短文,回答问题: 力传感器在电子秤中的应用电子秤所使用的测力装置是力传感器.
常见的一种力传感器由弹簧钢和应变片组成,其结构示意图如图甲所示.弹簧钢右端固定,在其上、下表面各贴一个相同的应变片.若在弹簧钢的自由端施加向下的作用力f,则弹簧钢发生弯曲,上应变片被拉伸,下应变片被压缩.力越大,弹簧钢的弯曲程度越大.
应变片结构如图乙所示,其中金属电阻丝的阻值对长度变化很敏感.给上、下金属电阻丝提供相等且大小不变的电流,上应变片两引线间电压为u 1 ,下应变片两引线间电压为u 2 ,传感器把这两个电压的差值u(u=u 1 -u 2 )输出,用来反映力f的大小.
金属电阻丝的阻值随温度会发生变化,其变化情况如图丙所示.为消除气温变化对测量精度的影响,需分别在上、下应变片金属电阻丝与引线之间串联一只合适的电阻,进行温度补偿.串联合适的电阻后,测量结果不再受温度影响.
(1)这种力传感器是将力的大小转换为 ____________ (电流/电压)的装置.
(2)外力f增大时,下列说法正确的是 ____________ .
a.上、下应变片金属电阻丝电阻都增大
b.上、下应变片金属电阻丝电阻都减小
c.上应变片金属电阻丝电阻减小,下应变片金属电阻丝电阻增大
d.上应变片金属电阻丝电阻增大,下应变片金属电阻丝电阻减小
(3)传感器输出的电压u随外力f增大而 ____________ .
(4)进行温度补偿时,应给上金属电阻丝串联阻值随温度升高而 ____________ 的电阻,下金属电阻丝串联阻值随温度升高而 ____________ 的电阻.
(5)如果未进行温度补偿,自由端受到相同的力f作用,该传感器下应变片两端的电压u 2 冬天比夏天 ____________ (大/小).幺毛二1年前1 -
qsrp 共回答了25个问题
|采纳率84%(1)电压
(2)D
(3)增大
(4)减小;减小
(5)小1年前查看全部
- (2014•鹰潭二模)如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F
(2014•鹰潭二模)如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图2所示.取g=10m/s2.则( )

A.物体的质量m=3.0kg
B.物体与水平面间的动摩擦因数μ=0.20
C.第2s内物体克服摩擦力做的功W=2.0J
D.前2s内推力F做功的平均功率
=3W.P tao__zui1年前1 -
kuku720 共回答了22个问题
|采纳率68.2%解题思路:解决本题的关键是理解速度图象的斜率的含义:速度图象的斜率代表物体的加速度.速度的正负代表物体运动的方向.A、由速度时间图象可以知道在2-3s的时间内,物体匀速运动,处于受力平衡状态,所以滑动摩擦力的大小为2N,
在1-2s的时间内,物体做匀加速运动,直线的斜率代表加速度的大小,所以a=[2−0/1]=2m/s2,由牛顿第二定律可得F-f=ma,所以m=[F−f/a]=[3−2/2]kg=0.5kg,所以A错误;
B、由f=μFN=μmg,所以:μ=[f/mg]=[2/5]=0.4,所以B错误;
C、第二秒内物体的位移是:x=[1/2]at2=[1/2]×2×1=1m,摩擦力做的功为:W=fx=-2×1J=-2J,故克服摩擦力所做的功为2.0J;故C正确;
在第一秒内物体没有运动,只在第二秒运动,F也只在第二秒做功,F的功为:W=Fx=3×1J=3J,所以前2S内推力F做功的平均功率为:P=[W/t]=[3/2]W=1.5W,所以D错误.
故选:C.点评:
本题考点: 功率、平均功率和瞬时功率;动摩擦因数;功的计算.
考点点评: 对于速度图象类的题目,主要是要理解斜率的含义:斜率代表物体的加速度;速度正负的含义:速度的正负代表物体运动的方向;速度图象与时间轴围成的面积的含义:面积代表物体的位移.1年前查看全部
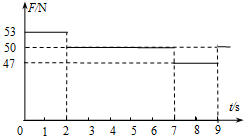
- 某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由静止开始运动,并测得重物
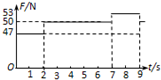 某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由静止开始运动,并测得重物对传感器的压力F随时间t变化的图象,如图所示.设电梯在第 1s末、第4s末和第8s末的速度大小分别为v1、v4和v8,以下判断中正确的是( )
某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由静止开始运动,并测得重物对传感器的压力F随时间t变化的图象,如图所示.设电梯在第 1s末、第4s末和第8s末的速度大小分别为v1、v4和v8,以下判断中正确的是( )
A.电梯在上升,且v1>v4>v8
B.电梯在下降,且v1>v4<v8
C.重物从1s到2s和从7s到8s动量的变化不相同
D.电梯对重物的支持力在第1s内和第9s内的功率相等0kzl1年前1 -
tiegao 共回答了8个问题
|采纳率75%解题思路:在0-2s内重物处于失重状态,电梯是由静止开始运动,说明电梯在下降.根据牛顿第二定律分析可知,0-2s内和7-9s内电梯的加速度大小相等,方向相反,在2-7s内电梯做匀速直线运动,由运动学公式分析三个速度的大小.重物从1s到2s,向下做匀加速运动,从7s到8s向下做匀减速运动,动量的变化大小相等,方向相反.电梯对重物的支持力在第1s内和第9s内的平均速度相等,支持力大小不等,功率不等.A、B,根据牛顿第二定律分析可知,电梯的运动情况是:0-2s内向下做匀加速运动,在2-7s内做匀速直线运动,7-9s内做匀减速运动,而且0-2s内和7-9s内电梯的加速度大小相等,说明电梯在第 1s末和第8s末速度相同,小于第4s末的速度.故A错误,B正确.
C、重物从1s到2s,向下做匀加速运动,重物的动量变化量为正值,说明动量变化量的方向向下;从7s到8s向下做匀减速运动,动量的变化量是负值,说明动量变化量的方向向上,所以重物从1s到2s和从7s到8s动量的变化不相同.故C正确.
D、电梯对重物的支持力在第1s内和第9s内的平均速度相等,支持力大小不等,功率不等.故D错误.
故选BC点评:
本题考点: 功率、平均功率和瞬时功率;牛顿第二定律;动量定理.
考点点评: 本题的关键要具有根据物体的受力情况分析运动情况的能力,这是学习物理的基本功.1年前查看全部
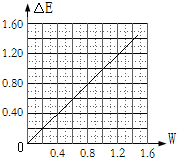
- 某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连
某实验小组利用力传感器和光电门传感器探究“动能定理”.将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图1所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计.
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;
②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为______;
③改变小车的质量或重物的质量,重复②的操作.
(2)下面表格中M是M1与小车中砝码质量之和,(△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=______,W3=______(精确到小数点后二位).
(3)根据表中的数据,请在图2坐标上作出△E-W图线.次数 M/kg |v22-v12|/m2s-2 △E/J F/N W/J 1 0.500 0.760 0.190 0.400 0.200 2 0.500 1.65 0.413 0.840 0.420 3 0.500 2.40 △E3 1.22 W3 4 1.00 2.40 1.20 2.42 1.21 5 1.00 2.84 1.42 2.86 1.43 紫嫣66661年前1 -
6565025 共回答了23个问题
|采纳率91.3%解题思路:要探究动能定理就需要求出力对小车做的总功和小车动能的变化,这就要求必须知道小车发生的位移即两光电门间距离.(1)根据动能定理知因要求总功必须已知小车位移,
故除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L.
(2)由△E=
1
2Mv22−
1
2Mv12,得△E3=
1
2×0.500×2.40=0.60J,
根据表中数据由功公式W=FL,可求出两光电门间距离L=[W/F]=0.5Kg,所以W3=F3•L=1.22×0.5J=0.61J.
(3)根据表中的数据,作出△E-W图线如右图所示.
故答案为:(1)②两光电门间的距离L(或AB间距离);(2)0.60;0.61;
(3)答案如上图所示.点评:
本题考点: 探究功与速度变化的关系.
考点点评: 做实验题时应先根据实验原理写出有关公式再讨论即可.小车在钩码的作用下在水平面上做加速运动,通过速度传感器可算出A B两点的速度大小,同时利用拉力传感器测量出拉小车的力,从而由AB长度可求出合力做的功与小车的动能变化关系.1年前查看全部

- (2008•宿迁模拟)如图中的实线所示是某同学利用力传感器悬挂一砝码在竖直方向运动时,数据采集器记录下的力传感器中拉力的
 (2008•宿迁模拟)如图中的实线所示是某同学利用力传感器悬挂一砝码在竖直方向运动时,数据采集器记录下的力传感器中拉力的大小变化情况.由图可知A、B、C、D四段图线中砝码处于超重状态的为( )
(2008•宿迁模拟)如图中的实线所示是某同学利用力传感器悬挂一砝码在竖直方向运动时,数据采集器记录下的力传感器中拉力的大小变化情况.由图可知A、B、C、D四段图线中砝码处于超重状态的为( )
A.A段
B.B段
C.C段
D.D段liushidong31年前1 -
datsing 共回答了24个问题
|采纳率83.3%解题思路:失重状态:当物体对接触面的压力小于物体的真实重力时,就说物体处于失重状态,此时有向下的加速度,合力也向下;
超重状态:当物体对接触面的压力大于物体的真实重力时,就说物体处于超重状态,此时有向上的加速度,合力也向上.当物体对接触面的压力大于物体的真实重力时,就说物体处于超重状态,此时有向上的加速度,合力也向上,由图可知,大于重力的地方为A、D两部分,所以A、D正确.
故选AD.点评:
本题考点: 超重和失重.
考点点评: 本题考查了学生对超重失重现象的理解,掌握住超重失重的特点,本题就可以解决了.1年前查看全部
- 如图甲所示为学校操场上一质量为20 kg的竖直滑竿,为了研究学生沿竿下滑的情况,在竿顶部装有一力传感器
如图甲所示为学校操场上一质量为20 kg的竖直滑竿,为了研究学生沿竿下滑的情况,在竿顶部装有一力传感器
可显示竿顶端所受拉力的大小.
现有一质量为50kg的学生从上端由静止滑下,滑到竿底时速度恰好为零.
以学生开始下滑计时时刻为起点,传感器显示的拉力随时间变化情况如图乙所示,g取10 m/s2.求:
1)该学生下滑过程中的最大速度;
(2)滑竿的长度.
为什么摩擦力是300N可可文文加油1年前1 -
鬼之魂魄 共回答了23个问题
|采纳率91.3%你的图在哪里1年前查看全部
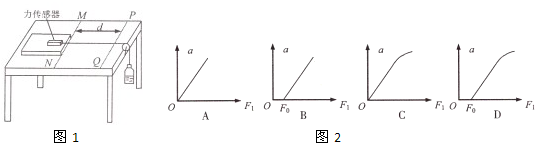
- 某同学设计了如图甲所示的装置来探究小车的加速度与所受合力的关系.将装有力传感器的小车放置于水平长木板上,缓慢向小桶中加入
某同学设计了如图甲所示的装置来探究小车的加速度与所受合力的关系.将装有力传感器的小车放置于水平长木板上,缓慢向小桶中加入细砂,直到小车刚开始运动为止,记下传感器的最大示数F0,以此表示小车所受摩擦力的大小.再将小车放回原处并按住,继续向小桶中加入细砂,记下传感器的示数F1.

(1)接通频率为50Hz的交流电源,释放小车,打出如图乙所示的纸带.从比较清晰的点起,每5个点取一个计数点,量出相邻计数点之间的距离,则小车的加速度a=______m/s2.
(2)改变小桶中砂的重力,多次重复实验,获得多组数据,描绘小车加速度a与合力F(F=F1-F0)的关系图象.不计纸带与计时器间的摩擦.下列图象中可能正确的是______.
(3)同一次实验中,小车释放前传感器示数F1与小车加速运动时传感器示数F2的关系是F1______F2(选填“<”、“=”或“>”).
(4)关于该实验,下列说法中正确的是______.
A.小车和传感器的总质量应远大于小桶和砂的总质量
B.实验中需要将长木板右端垫高
C.实验中需要测出小车和传感器的总质量
D.用加砂的方法改变拉力的大小与挂钩码的方法相比,可更方便地获取多组实验数据.锐欧1年前1 -
合肥军 共回答了18个问题
|采纳率100%解题思路:根据匀变速直线运动的推论公式△x=aT2可以求出加速度的大小;(1)由于每相邻两个计数点间还有4个点,所以相邻的计数点间的时间间隔T=0.1s,
根据匀变速直线运动的推论公式△x=aT2可以求出加速度的大小,
得:a=
0.0368−0.0352
0.12=0.16 m/s2,
(2)改变小桶中砂的重力,多次重复实验,获得多组数据,描绘小车加速度a与合力F(F=F1-F0)的关系图象.
由于已经平衡摩擦力,所以图象应该过原点.故AB正确,CD错误;
故选:AB.
(3)对小桶受力分析,设小桶重力为mg,
木板释放前弹簧秤的示数F1,所以F1=mg,
设小车的重力为Mg,小车在加速运动时弹簧秤的示数F2,
根据牛顿第二定律得:mg-F2=ma
所以F1>F2,
(4)A、在该实验中实际是:mg=(M+m)a,要满足mg=Ma,应该使小车和传感器的总质量应远大于小桶和砂的总质量,故A正确;
B、实验中不需要将长木板右端垫高,因为已经测量了小车所受摩擦力的大小,故B错误;
C、实验中不需要测出小车和传感器的总质量,只需要保证小车和传感器的总质量不变,故C错误;
D、用加砂的方法改变拉力的大小与挂钩码的方法相比,可更方便地获取多组实验数据,故D正确;
故选:AD.
故答案为:(1)0.16
(2)A B
(3)>
(4)AD点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 本题借助实验考查了匀变速直线的规律以及推论的应用,在平时练习中要加强基础知识的理解与应用,提高解决问题能力.解决实验问题首先要掌握该实验原理,了解实验的操作步骤和数据处理以及注意事项,其中平衡摩擦力的原因以及做法在实验中应当清楚.1年前查看全部
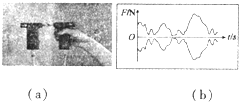
- 用计算机辅助实验系统验证牛顿第三定律.把两个力传感器的挂钩钩在一起,向相反方向拉动,如图(a)所示.观察显示器屏幕上出现
 用计算机辅助实验系统验证牛顿第三定律.把两个力传感器的挂钩钩在一起,向相反方向拉动,如图(a)所示.观察显示器屏幕上出现的结果如图(b)所示,观察分析相互作用力随时间变化的曲线,可以得出( )
用计算机辅助实验系统验证牛顿第三定律.把两个力传感器的挂钩钩在一起,向相反方向拉动,如图(a)所示.观察显示器屏幕上出现的结果如图(b)所示,观察分析相互作用力随时间变化的曲线,可以得出( )
A.作用力与反作用力不是同时存在的
B.作用力与反作用力作用在同一物体上
C.作用力与反作用力大小相等
D.作用力与反作用力方向相反sweeter1年前1 -
流水IYII 共回答了13个问题
|采纳率76.9%解题思路:作用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.A、作用力与反作用力同时产生、同时消失,总是相等,故A错误;
B、作用力与反作用力是两个物体间的相互作用力,作用在不同的物体上,故B错误;
C、根据牛顿第三定律,作用力与反作用力大小相等,故C正确;
D、根据牛顿第三定律,作用力与反作用力方向相反且作用在同一条直线上,故D正确;
故选:CD.点评:
本题考点: 作用力和反作用力.
考点点评: 解决本题的关键知道作用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.1年前查看全部
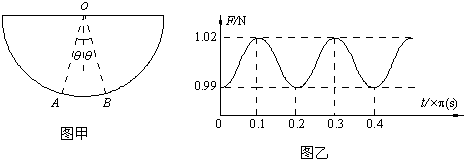
- 将力传感器连接到计算机上就可以测量迅速变化的力的大小.在图甲所示的装置中,可视为质点的小滑块沿固定的光滑半球形容器内壁在
将力传感器连接到计算机上就可以测量迅速变化的力的大小.在图甲所示的装置中,可视为质点的小滑块沿固定的光滑半球形容器内壁在竖直平面的AB之间往复运动,OA、OB与竖直方向之间的夹角相等且都为θ(θ<10°).某次实验,用力传感器测得滑块对器壁的压力大小F随时间t变化的曲线如图乙所示,图中t=0时,滑块从A点开始运动.试根据力学规律和题中(包括图中)所给出的信息.(g取10m/s2)求:
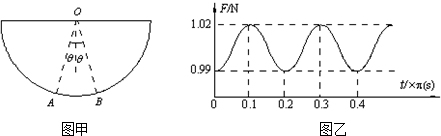
(1)压力大小F随时间t变化的周期与小滑块运动的周期之比;
(2)容器的半径.jy2030051年前1 -
arkijiang 共回答了19个问题
|采纳率89.5%解题思路:(1)通过图象得出压力大小随时间变化的周期,滑块的周期是压力变化周期的2倍.
(2)根据滑块的周期,结合单摆的周期公式求出 容器的半径.(1)读图可得,压力大小F随时间t变化的周期T1=0.2πs.
经判断知滑块运动的周期T1是压力大小变化周期T2的2倍,故
T1
T2=
1
2.
(2)滑块在AB之间做类似于单摆的简谐运动,周期T2=0.4π s
由T2=2π
R
g得,容器的半径:R=
T22g
4π2=0.4 m
答:(1)压力大小F随时间t变化的周期与小滑块运动的周期之比为[1/2].
(2)容器的半径为0.4m.点评:
本题考点: 常见传感器的工作原理.
考点点评: 本题综合考查了简谐运动,以及考查学生的读图能力,解决本题的关键知道滑块所做的运动是单摆运动,知道单摆运动的周期公式.1年前查看全部
- 用计算机辅助实验系统做验证牛顿第三定律的实验时,把两个力传感器的探头挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的
 用计算机辅助实验系统做验证牛顿第三定律的实验时,把两个力传感器的探头挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的结果(如图所示).观察分析两个力传感器的相互作用力随时间变化的曲线,可以得到以下实验结论( )
用计算机辅助实验系统做验证牛顿第三定律的实验时,把两个力传感器的探头挂钩钩在一起,向相反方向拉动,观察显示器屏幕上出现的结果(如图所示).观察分析两个力传感器的相互作用力随时间变化的曲线,可以得到以下实验结论( )
A.作用力与反作用力方向相反
B.作用力与反作用力作用在同一物体上
C.作用力与反作用力大小相等
D.作用力与反作用力是一对平衡力闲夫1年前1 -
kinon 共回答了15个问题
|采纳率80%解题思路:作用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.A、作用力与反作用力方向相反且作用在同一条直线上,故A正确;
B、作用力与反作用力是两个物体间的相互作用力,作用在不同的物体上,故B错误;
C、根据牛顿第三定律,作用力与反作用力大小相等,故C正确;
D、作用力与反作用力与平衡力不同,故D错误;
故选:AC.点评:
本题考点: 作用力和反作用力.
考点点评: 解决本题的关键知道作用力与反作用力大小相等,方向相反,作用在同一条直线上,且同时产生、同时变化、同时消失,作用在不同的物体上.1年前查看全部
- 某同学设计了如图1所示的装置来探究加速度与力的关系,力传感器固定在一合适的木板上,桌面的右边缘固定一光滑的定滑轮,细绳的
某同学设计了如图1所示的装置来探究加速度与力的关系,力传感器固定在一合适的木板上,桌面的右边缘固定一光滑的定滑轮,细绳的两端分别与力传感器和矿泉水瓶连接,在桌面上画出两条平行线MN、PQ,并测出间距d,开始时将木板置于MN处,缓慢向瓶中加水,直到木板刚刚开始运动为止,记下力传感器的示数F0,以此表示滑动摩擦力的大小,再将木板放回原处并按住,继续向瓶中加水后,然后释放木板,力传感器的示数为F1,并用秒表记下木板运动到PQ处的时间t.
(1)实验中力传感器示数F1______(填“大于”、“小于”、“等于”)此时矿泉水瓶及水的重力G;
(2)木板的加速度可以用d,t表示为a=[2dt2 并非闲话1年前1 -
可悲的第三者 共回答了12个问题
|采纳率91.7%解题思路:根据运动学公式求出加速度.知道当水的质量远远小于木板的质量时,水的重力近似等于绳子的拉力,缓慢向瓶中加水,可以更方便地获取多组实验数据,但不能改变滑动摩擦力的大小,也不能精确的测出拉力的大小.(1)矿泉水瓶及水向下做加速运动,根据牛顿第二定律可知,G-F1=ma,所以F1小于G,
根据匀变速直线运动公式得:d=
1/2at 2,
解得:a=
2d
t2]
(2)当F1>F0时,木板才产生加速度,加速度与力成正比.故选B.
(3)A、不可以改变滑动摩擦力的大小,故A错误.
B.缓慢向瓶中加水,可以更方便地获取多组实验数据,故B正确.
C.缓慢向瓶中加水,直到木板刚刚开始运动,可以比较精确地测出摩擦力的大小,不可以更精确的测出拉力的大小,故C错误.
D.并没有获得很大的加速度,可以获取多组实验数据以提高实验精度.故D错误.
故选:B.
故答案为:(1)小于;(2)
2d
t2;(3)B;(4)B点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 书本上的实验,我们要从实验原理、实验仪器、实验步骤、实验数据处理、实验注意事项这几点去搞清楚.实验的图象描绘,物理结合数学的应用都值得注意.1年前查看全部

- 如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变
如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图乙所示.取g=10 m/s 2 .则( )
A.物体的质量m=1.0 kg B.物体与水平面间的动摩擦因数μ=0.20 C.第2秒内物体克服摩擦力做的功W=1.8J D.前2秒内推力F做功的平均功率  =1.5W2cb3q1年前1
=1.5W2cb3q1年前1 -
xudann 共回答了15个问题
|采纳率86.7%解题思路:第
2s 内,由 图象可知,加速度
图象可知,加速度 ,由牛顿第二定律可知:
,由牛顿第二定律可知: ;第
;第3s 内物体做匀速直线运动, ,解得:
,解得: ,
, ,选项A.
,选项A. B 均错误。第2s 内物体运动的位移为 ,摩擦力为
,摩擦力为2N ,故克服摩擦力做的功 ,选项
,选项C 错误。前2s 内推力做功为 ,平均功率
,平均功率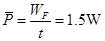 ,选项
,选项D 正确。故选D.D
<>1年前查看全部










- 如图甲所示,物体受到水平推力F的作用,在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t
 如图甲所示,物体受到水平推力F的作用,在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图乙所示.取g=10m/s2,则( )
如图甲所示,物体受到水平推力F的作用,在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图乙所示.取g=10m/s2,则( )
A.物体的质量m=1.0kg
B.物体与水平面间的动摩擦因数μ=0.40
C.前3s内物体的平均速度为1.5m/s
D.前3s内物体所受摩擦力为2Njonarson1年前1 -
412251 共回答了21个问题
|采纳率90.5%解题思路:解决本题的关键是理解速度图象的斜率的含义:速度图象的斜率代表物体的加速度.速度的正负代表物体运动的方向.A、在1-2s的时间内,物体做匀加速运动,直线的斜率代表加速度的大小,所以a=[2−0/1]=2m/s2,由牛顿第二定律可得F-f=ma,
得:m=[F−f/a]=[3−2/2]kg=0.5kg,所以A错误;
B、由速度时间图象可以知道在2-3s的时间内,物体匀速运动,处于受力平衡状态,所以滑动摩擦力的大小为2N,由f=μmg
得:μ=[f/mg]=[2/0.5×10]=0.40;故B正确;
C、前3s内的位移为:x=[2+3/2]m=2.5m;故平均速度为:v=[2.5/3]m/s=0.8m/s;故C错误;
D、前1s内物体合外力为零,处于静止状态,故摩擦力为零;故D错误;
故选:B.点评:
本题考点: 摩擦力的判断与计算.
考点点评: 对于速度图象类的题目,主要是要理解斜率的含义:斜率代表物体的加速度;速度正负的含义:速度的正负代表物体运动的方向;速度图象与时间轴围成的面积的含义:面积代表物体的位移.1年前查看全部
- 如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动。通过力传感器和速度传感器监测到推力F、物体速度v随时间t变
如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动。通过力传感器和速度传感器监测到推力F、物体速度v随时间t变化的规律如图2所示。取g= 10m/s 2 。则( )
A.物体的质量m =" 3.0" kg B.物体与水平面间的动摩擦因数μ=0.20 C.第2s内物体克服摩擦力做的功W=" 2.0" J D.前2s内推力F做功的平均功率  =" 3" W熊熊狗1年前1
=" 3" W熊熊狗1年前1 -
hen77 共回答了13个问题
|采纳率84.6%解题思路:0−1s 内物体静止不动,1−2s 内物体做匀加速直线运动,加速度大小为2m/s2 ,F=3N ,2−3s 内物体做匀速直线运动,f=2N ,由牛顿第二定律得F−f=ma ,m=0.5kg ,A 错误;f=μmg ,得μ=0.40 ,B 错误;第2s 内物体位移为x=at2/2=1m ,则物体克服摩擦力做功为fx=2J ,C 正确;前2s 内推力做功为W=Fx=3J ,则平均功率为="1.5"W ,D 错误。C
<>1年前查看全部

- (2014•海淀区模拟)某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由
 (2014•海淀区模拟)某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由静止开始运动,并测得重物对传感器的压力F随时间t变化的图象,如图所示.设电梯在第 1s末、第4s末和第8s末的速度大小分别为v1、v4和v8,以下判断中正确的是( )
(2014•海淀区模拟)某同学为了研究超重和失重现象,将重为50N的物体带上电梯,并将它放在电梯中的力传感器上.若电梯由静止开始运动,并测得重物对传感器的压力F随时间t变化的图象,如图所示.设电梯在第 1s末、第4s末和第8s末的速度大小分别为v1、v4和v8,以下判断中正确的是( )
A.电梯在上升,且v1>v4>v8
B.电梯在下降,且v1>v4<v8
C.重物从1s到2s和从7s到8s动量的变化不相同
D.电梯对重物的支持力在第1s内和第8s内做的功相等watchzhang1年前1 -
大米小女 共回答了23个问题
|采纳率87%解题思路:在0-2s内重物处于超重状态,电梯是由静止开始运动,说明电梯在上升.根据牛顿第二定律分析可知,0-2s内和7-9s内电梯的加速度大小相等,方向相反,在2-7s内电梯做匀速直线运动,由运动学公式分析三个速度的大小.重物从1s到2s,向上做匀加速运动,从7s到8s向上做匀减速运动,动量的变化大小相等,方向相反.电梯对重物的支持力在第1s内和第9s内的平均速度相等,支持力大小不等,功率不等.A、B,根据牛顿第二定律分析可知,电梯的运动情况是:0-2s内向上做匀加速运动,在2-7s内做匀速直线运动,7-9s内做匀减速运动,而且0-2s内和7-9s内电梯的加速度大小相等,说明电梯在第 1s末和第8s末速度相同,小于第4s末的速度.故AB错误.
C、重物从1s到2s,向上做匀加速运动,重物的动量变化量为正值,说明动量变化量的方向向上;从7s到8s向下做匀减速运动,动量的变化量是负值,说明动量变化量的方向向下,所以重物从1s到2s和从7s到8s动量的变化不相同.故C正确.
D、电梯对重物的支持力在第1s内和第9s内的平均速度相等,支持力大小不等,功率不等.故D错误.
故选C点评:
本题考点: 牛顿运动定律的应用-超重和失重;功的计算.
考点点评: 本题的关键要具有根据物体的受力情况分析运动情况的能力,这是学习物理的基本功.1年前查看全部
- 某同学利用如图(a)装置研究外力与加速度的关系.将力传感器和位移传感器的发射端安装在置于水平轨道的小车上,将细绳的一端系
某同学利用如图(a)装置研究外力与加速度的关系.将力传感器和位移传感器的发射端安装在置于水平轨道的小车上,将细绳的一端系在力传感器测量挂钩上,另一端绕过光滑定滑轮悬挂钩码.开始实验后,依次按照如下步骤操作:
①同时打开力传感器和位移传感器;
②释放小车;
③关闭传感器,根据计算机显示的F-t和v-t图象记录下小车在此次加速运动过程中绳子的拉力F和小车加速度a.
④改变钩码质量,重复上述步骤.
(1)某次释放小车后计算机显示的F-t和v-t图象如图(b).根据图象,此次操作应记录下的外力F大小为______N,加速度a为______m/s2.
(2)根据上述实验器材和过程画出a-F图象的示意图如图(c),那么理论上图线斜率应等于______,图线不过原点的原因可能是______. gfaha1年前1
gfaha1年前1 -
魂游故里 共回答了15个问题
|采纳率93.3%解题思路:了解该实验装置,知道实验过程中小车的运动情况.
根据F-t,v-t图象求出F大小和a的大小.
由图象可以看出:图线不通过坐标原点,当F为某一值时,加速度为零,知平衡摩擦力不足.(1)根据v-t图象得到0.8s前小车是静止的,0.8s后小车做匀加速运动.
所以此次操作应记录下的外力F大小为0.82N,
根据v-t图象的斜率求出加速度a=[△v/△t]=1.6m/s2.
(2)根据a=[F/m]得理论上图线斜率应等于小车的质量倒数,
由图象可知:图线不通过坐标原点,F不为零时,加速度仍为零,知没有平衡摩擦力或平衡摩擦力不足.
故答案为:(1)0.82;1.6;
(2)小车的质量倒数,没有平衡摩擦力或平衡摩擦力不足.点评:
本题考点: 探究加速度与物体质量、物体受力的关系.
考点点评: 通过作图法研究两个变量之间的关系是物理里常用的一种手段,只有直线图形可以清楚地说明两变量之间的关系.1年前查看全部
- (1)将一个力传感器接到计算机上,就可以测量快速变化的力,用这种方法测得的某单摆摆动时悬线上拉力的大四随时间变化的曲线如
(1)将一个力传感器接到计算机上,就可以测量快速变化的力,用这种方法测得的某单摆摆动时悬线上拉力的大四随时间变化的曲线如图所示.由此图线提供的信息可判断摆球摆动的周期T为______e,在摆动过程中四球的机械能将______(选填“减四”、“增大”、“不变”)
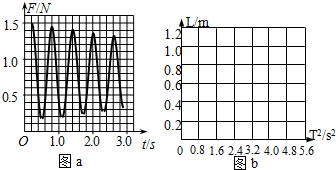
(2)用单摆测定重力加速度实验中,得到如下一组有关数据:
①利用上述数据在图0中描出中-T2图线物理量 第1次 第2次 第3次 第t次 第的次 摆长中(十) 0.的 0.6 0.8 1.0 1.2 周期T2(e2) 2.2 2.t 3.2 t.0 t.8
②利用图线求得重力加速度大四为______十/e2(取π2=9.86)
③在实验中,若用计算法求g值,求得g值偏四,可能是下列原因中的______
A.计算摆长时,只考虑悬线长度,而未加四球半径
0.测量周期时,将n次全振动误记为n+1次全振动
C.计算摆长时,将悬线长加四球直径
D.单摆振动时,振幅偏四.石三一1年前0 -
共回答了个问题
|采纳率
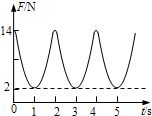
- 将一个力传感器连接到计算机上,我们就可以测量快速变化的力.图中所示就是用这种方法测得的小滑块在半球形碗内在竖直平面内来回
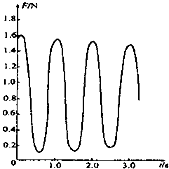 将一个力传感器连接到计算机上,我们就可以测量快速变化的力.图中所示就是用这种方法测得的小滑块在半球形碗内在竖直平面内来回滑动时,对碗的压力大小随时间变化的曲线.从这条曲线提供的信息,可以判断滑块约每隔______s经过碗底一次;若滑块质量为0.1kg,半圆形碗的半径为15cm,则从图象中能观察到滑块运动过程中的最大速度为______m/s. amyjin771年前1
将一个力传感器连接到计算机上,我们就可以测量快速变化的力.图中所示就是用这种方法测得的小滑块在半球形碗内在竖直平面内来回滑动时,对碗的压力大小随时间变化的曲线.从这条曲线提供的信息,可以判断滑块约每隔______s经过碗底一次;若滑块质量为0.1kg,半圆形碗的半径为15cm,则从图象中能观察到滑块运动过程中的最大速度为______m/s. amyjin771年前1 -
坐井观天004 共回答了15个问题
|采纳率86.7%解题思路:滑块每次经过最低点时,速度最大,弹力最大;在最低点,重力和支持力的合力提供向心力,根据牛顿第二定律列式求解最大速度.滑块每次经过最低点时,速度最大,弹力最大;从图象可以看出,每经过1s,弹力最大,故每经过1s小球到碗底;
由图象,最大支持力为1.6N,根据牛顿第二定律,有:N-mg=m
v2
r,解得:
v=
(N−mg)r
m=
(1.6−1)×0.15
0.1≈0.95m/s;
故答案为:1.0,0.95.点评:
本题考点: 单摆周期公式;牛顿第二定律;向心力.
考点点评: 本题关键根据图象得到最大弹力,然后根据牛顿第二定律列方程求解最大速度.1年前查看全部
- 某同学利用如图甲所示的装置验证变力做功情况下的动能定理:在气垫导轨上相隔一定距离的两处安装两个光电门Ⅰ、Ⅱ,将一力传感器
某同学利用如图甲所示的装置验证变力做功情况下的动能定理:在气垫导轨上相隔一定距离的两处安装两个光电门Ⅰ、Ⅱ,将一力传感器一端连在细线M上,另一端接在水平竖直挡光条,气垫导轨左端固定位移传感器(接收器).用变力转动转轮使滑块沿轨道运动,当滑块上挡光片经过光电门Ⅰ时,光线被遮挡,光电门Ⅰ会输出高电压给相连的计算机,在计算机上就显示如图乙中△t 1 段所示图象,同时指令力传感器以及位移传感器工作,当挡光片讲过光电门Ⅱ时,计算机显示图象如图乙中△t 2 段图象所示,同时计算机指令力传感器和位移传感器停止工作,这样计算机就得到这一过程滑块的F-S图象,如图炳所示.
(1)实验前,将滑块置于气垫导轨上,滑块、N不相连接,接通气源,轻推滑块,当图乙中的△t 1 ______△t 2 (选填“>”、“<”或“=”)时,说明气垫导轨已经水平.
(2)若测得竖直挡光条宽度为d,滑块的质量为m,通过计算机又读出实验中图乙中的△t 1 、△t 2 ,请写出实验中计算滑块动能的增量△E k 的表达式______.(用已知量和测量量表示)
(3)通过计算机所绘F-s图线可以算出滑块所受力在s=0.8m内这一过程中所做的功W,W=______J.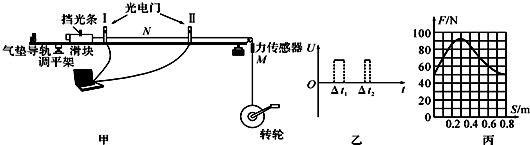 bjbiren1年前1
bjbiren1年前1 -
人鱼童话 共回答了18个问题
|采纳率100%(1)滑块匀速直线运动时说明气垫导轨水平,此时滑块通过两光电门的时间相等,即△t 1 =△t 2
(2)由 v 1 =
d
△t 1 ,v 2 =
d
△t 2 ,并且 E K =
1
2 mv 2 得,滑块动能的增量△E k 的表达式为△E k =
1
2 m [ (
d
△t 2 ) 2 - (
d
△t 1 ) 2 ]
(3)F-s图象中,图线与坐标轴围成的面积表示功,W≈50×0.8+
1
2 ×0.8×(90-50)J=56J
故答案为:=;
1
2 m [ (
d
△t 2 ) 2 - (
d
△t 1 ) 2 ];561年前查看全部
- 如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随着时间t
如图1所示,物体受到水平推力F的作用在粗糙水平面上做直线运动.通过力传感器和速度传感器监测到推力F、物体速度v随着时间t变化的规律如图2所示.取g=10m/s2.则根据图象可得固体的质量为______kg.前2s内推力F做功的平均功率为______W.
 二邦主1年前1
二邦主1年前1 -
隔世红颜008 共回答了20个问题
|采纳率90%解题思路:解决本题的关键是理解速度图象的斜率的含义:速度图象的斜率代表物体的加速度.速度的正负代表物体运动的方向.A、由速度时间图象可以知道在2-3s的时间内,物体匀速运动,处于受力平衡状态,所以滑动摩擦力的大小为2N,
在1-2s的时间内,物体做匀加速运动,直线的斜率代表加速度的大小,所以a=[2−0/1]=2m/s2,由牛顿第二定律可得F-f=ma,
所以m=[F−f/a=
3−2
2]kg=0.5kg,根据速度图象与时间轴围成的面积代表物体的位移可知,第二秒内物体的位移是:x=[1/2]×2×1=1m,在第一秒内物体没有运动,只在第二秒运动,F也只在第二秒做功,F的功为:W=Fx=3×1J=3J,所以前2S内推力F做功的平均功率为:P=[W/t=
3
2]W=1.5W.
故答案为:0.5;1.5点评:
本题考点: 功率、平均功率和瞬时功率.
考点点评: 对于速度图象类的题目,主要是要理解斜率的含义:斜率代表物体的加速度;速度正负的含义:速度的正负代表物体运动的方向;速度图象与时间轴围成的面积的含义:面积代表物体的位移.1年前查看全部
- 某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力
 某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力F,并用另外一个传感器对木块的运动状态进行监测,表是她记录的实验数据.木块的重力为10.ON,重力加速度g=9.80m/s2,根据表格中的数据回答下列问题(答案保留3位有效数字):
某同学在探究摩擦力的实验中采用了如图所示的操作,将一个长方体木块放在水平桌面上,然后用一个力传感器对木块施加一个水平拉力F,并用另外一个传感器对木块的运动状态进行监测,表是她记录的实验数据.木块的重力为10.ON,重力加速度g=9.80m/s2,根据表格中的数据回答下列问题(答案保留3位有效数字):
(1)木块与桌面间的最大静摩擦力≥______N;实验次数 运动状态 水平拉力F/N 1 静止 3.62 2 静止 4.00 3 静止 4.02 4 匀速 4.01 5 匀加速 5.01 6 匀加速 5.49
(2)木块与桌面间的动摩擦因数______;
(3)实验次数6中监测到的加速度a=______m/s2.痞子龙_a1年前1 -
happy_sweet 共回答了19个问题
|采纳率94.7%解题思路:(1)物体相对静止时受到的摩擦力是静摩擦力,摩擦力的最大值是最大静摩擦力,静摩擦力小于等于最大静摩擦力;
物体在拉力与摩擦力作用下静止,处于平衡状态,静摩擦力等于拉力,根据表中实验数据判断最大静摩擦力的大小;
(2)物体在水平力作用下沿水平面运动时,FN=mg,Ff=F=FNμ由此可求出滑动摩擦因数大小;
(3)根据牛顿第二定律列方程可以求出物体的加速度大小.(1)由表中实验数据可知,第3次实验时,物体受到的静摩擦力f=F=4.02N,
物体受到的静摩擦力小于等于最大静摩擦力,因此木块与桌面间的最大静摩擦力≥4.02N;
(2)木块做匀速直线运动,处于平衡状态,受到的滑动摩擦力Ff=F=4.01N,
滑动摩擦力为:Ff=FNμ ①FN=G ②
联立①②μ=
Ff
G=[4.01N/10.0N]=0.401.
(3)由牛顿第二定律得:
F6-Ff=ma,带入数据解得:a=1.45m/s2.
故答案为:(1)4.02;(2)0.401;(3)1.45.点评:
本题考点: 探究影响摩擦力的大小的因素.
考点点评: 滑动摩擦力大小跟压力大小、接触面粗糙程度有关,跟物体受到的拉力大小、物体的运动速度都没有关系,正确根据物体所处状态列方程求解.1年前查看全部
- 某实验小组在电梯内固定一个力传感器,在传感器下方悬 挂一个重为10N的钩码,测出的力随时间的变化规
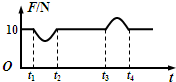 某实验小组在电梯内固定一个力传感器,在传感器下方悬挂一个重为10N的钩码,测出的力随时间的变化规律如图所示.则下列分析正确的是( )
某实验小组在电梯内固定一个力传感器,在传感器下方悬挂一个重为10N的钩码,测出的力随时间的变化规律如图所示.则下列分析正确的是( )
A.从t1到t2,钩码处于失重状态
B.从t3到t4,钩码处于超重状态
C.电梯可能开始在1楼,先加速向上,接着匀速向上,再减速向上,最后停在3楼
D.电梯可能开始在3楼,先加速向下,接着匀速向下,再减速向下,最后停在1楼天生好男儿1年前1 -
wenjj72 共回答了15个问题
|采纳率86.7%解题思路:当钩码受到的拉力大于重力时,钩码处于超重状态,加速度向上;当钩码受到的拉力小于重力时,钩码处于失重状态,加速度向下;根据图象并结合实际情况得到拉力变化规律,从而得到电梯的运动情况.A、从时该t1到t2,钩码受到的拉力小于重力时,钩码处于失重状态,所以A正确;
B、从时刻t3到t4,钩码受到的拉力大于重力,钩码处于超重状态,加速度向上,故B正确;
C、如果电梯开始停在低楼层,先加速向上,接着匀速向上,再减速向上,最后停在高楼层,那么应该从图象可以得到,拉力先等于重力、再大于重力、然后等于重力、小于重力、最后等于重力,故C错误;
D、如果电梯开始停在高楼层,先加速向下,接着匀速向下,再减速向下,最后停在低楼层,那么应该是拉力先等于重力、再小于重力、然后等于重力、大于重力、最后等于重力,故D正确.
故选:ABD点评:
本题考点: 超重和失重;牛顿第二定律.
考点点评: 本题关键是根据拉力的变化情况,得到超、失重情况,然后与实际情况向对照,得到电梯的运动情况.1年前查看全部
- 下列说法不正确的是( )A.话筒是一种常见的声传感器B.电熨斗是温度传感器C.电子秤所使用的测力装置是力传感器D.电冰
下列说法不正确的是( )
A.话筒是一种常见的声传感器
B.电熨斗是温度传感器
C.电子秤所使用的测力装置是力传感器
D.电冰箱的温度控制是使用光传感器skywalker211年前1 -
法tt妆品直送店 共回答了23个问题
|采纳率82.6%解题思路:传感器作为一种将其它形式的信号与电信号之间的转换装置,在我们的日常生活中得到了广泛应用,不同传感器所转换的信号对象不同,我们应就它的具体原理进行分析.A、话筒将声音信号转变为电信号,是一种常见的声传感器,故A正确;
B、电熨斗使用温度传感器控制温度,故B正确;
C、电子秤所使用的测力装置是力传感器,故C正确;
D、电冰箱的温度控制是使用温度感器,故D错误.
本题选择错误的,
故选:D.点评:
本题考点: 传感器在生产、生活中的应用.
考点点评: 传感器能够将其他信号转化为电信号,它们在生产生活中应用非常广泛,在学习中要注意体会.1年前查看全部
- (1)这种力传感器是将力的大小转换为 ▲ (电流/电压)的装置. (2)外力F增大时,下列说法正确的是 ▲ .
(1)这种力传感器是将力的大小转换为 ▲ (电流/电压)的装置. (2)外力F增大时,下列说法正确的是 ▲ .
(1)这种力传感器是将力的大小转换为 ▲ (电流/电压)的装置.
(2)外力F增大时,下列说法正确的是 ▲ .
A.上、下应变片金属电阻丝电阻都增大
B.上、下应变片金属电阻丝电阻都减小
C.上应变片金属电阻丝电阻减小,下应变片金属电阻丝电阻增大
D.上应变片金属电阻丝电阻增大,下应变片金属电阻丝电阻减小
(3)传感器输出的电压U随外力F增大而 ▲ .
(4)进行温度补偿时,应给上金属电阻丝串联阻值随温度升高而 ▲ 的电阻,下金属电阻丝串联阻值随温度升高而 ▲ 的电阻.
(5)如果未进行温度补偿,自由端受到相同的力F作用,该传感器下应变片两端的电压U2冬天比夏天 ▲ (大/小).爱情小男儿1年前1 -
shuijingshui 共回答了18个问题
|采纳率100%(1)电压 (2)D (3)增大
(4)减小 减小 (5)小1年前查看全部
- 下列说法的不正确是( ) A.电子秤所使用的测力装置是力传感器 B.电熨斗能够自动控制温度的原因是它装有双金属片温度
下列说法的不正确是( )
A.电子秤所使用的测力装置是力传感器 B.电熨斗能够自动控制温度的原因是它装有双金属片温度传感器,这种传感器的作用是控制电路的通断 C.热敏电阻能够把温度这个热学量转换为电阻这个电学量 D.霍尔元件能够把电压这个电学量转换为磁感应强度这个磁学量 紫贝菜1年前1 -
zn_sea 共回答了10个问题
|采纳率90%D
1年前查看全部
- 某班级同学用如图(a)所示的装置验证加速度a和力F、质量m的关系.甲、乙两辆小车放在倾斜轨道上,小车甲上固定一个力传感器
某班级同学用如图(a)所示的装置验证加速度a和力F、质量m的关系.甲、乙两辆小车放在倾斜轨道上,小车甲上固定一个力传感器,小车乙上固定一个加速度传感器(可以测量乙在任意时刻的加速度大小),力传感器和小车乙之间用一根不可伸长的细线连接,在弹簧拉力的作用下两辆小车一起开始运动,利用两个传感器可以采集记录同一时刻小车乙受到的拉力和加速度的大小.
(1)下列关于实验装置和操作的说法中正确的是______(多选)
(A)轨道倾斜是为了平衡小车甲受到的摩擦力
(B)轨道倾斜是为了平衡小车乙受到的摩擦力
(C)实验中,在小车乙向下运动的过程中均可采集数据
(D)实验中,只能在小车乙加速运动的过程中采集数据
(2)四个实验小组选用的小车乙(含力传感器)的质量分别为m 1 =0.5kg、m 2 =1.0kg、m 3 =1.5kg和m 4 =2.0kg,其中有三个小组已经完成了a-F图象,如图(b)所示.最后一个小组的实验数据如下表所示,请在图(b)中完成该组的a-F图线;
(3)在验证了a和F的关系后,为了进一步验证a和m的关系,可直接利用图(b)的四条图线收集数据,然后作图.请写出具体的做法:实验次数 1 2 3 4 5 6 拉力F(N) 24.5 20.0 17.5 12.0 8.1 4.8 加速度a(m/s 2 ) 16.3 13.3 11.7 8.0 5.4 3.2
①如何收集数据?______;
②为了更直观地验证a和m的关系,建立的坐标系应以______为纵轴:以______为横轴. 麻雀A11年前1
麻雀A11年前1 -
jiang2005 共回答了25个问题
|采纳率96%(1)A、本实验是研究小车乙的加速度a和力F、质量m的关系,所以轨道倾斜是为了平衡小车乙受到的摩擦力,故A错误,B正确C、实验中,只能在小车乙加速运动的过程中采集数据,故C错误,D正确故选BD(2)根据描点...1年前查看全部
大家在问
- 1好词8个,好句2句,感悟50字!
- 2如何翻译do not wave at no cost
- 3高二数学椭圆E的焦点在X轴上,离心率1/2,对称轴为坐标轴,且经过点(1,3/2)直线y=kx-2与椭圆E相交于A,B两
- 4I can see some flowers on the m________
- 5指出下列复合函数的复合过程,并求出它的导数!求学霸3√1/1+x^2
- 6求,在括号里填上动词.()the bed() the table ()long jump()the flowers()
- 7北师大小学三年级下写哪西作文
- 8太贵了,能不能给我一个便宜的 用英语怎么说
- 9从小到大写出5个11的倍数。(求学霸解答,先答必采纳)
- 10在如图所示的电路中,电源电压保持不变,滑动变阻器R2上标有20欧 3A字样.闭合电键S
- 11只有一个地球,如果它被破坏了,我们别无去处.如果地球上的各种资源都枯竭了,我们很难从别的地方得到补
- 12劈尖干涉中,光在空气膜下表面反射,有半波损失,那应该是…-λ/2呀,可书上是…+λ/2,谁能帮我解释
- 13自感线圈和可变电容器组成的振荡电路,能产生535kHz到1605kHz的电磁振荡,已知线圈的自感系数是300μH,求可变
- 14小学四年级上册科学教学计划急求义务教育课程标准实验教科书小学四年级科学上册教学计划
- 15你对英文诗词的理解?"As I gaze upon your heavenly face; I cannot help