某步进电机的步距角为0.75°,通过一对齿轮副(主动齿轮的齿数为24,被动齿轮的齿数为20)传动一导程为4mm的滚动丝杠
 小猫快跑1232022-10-04 11:39:541条回答
小猫快跑1232022-10-04 11:39:541条回答
某步进电机的步距角为0.75°,通过一对齿轮副(主动齿轮的齿数为24,被动齿轮的齿数为20)传动一导程为4mm的滚动丝杠,由丝杠螺母副驱动工作台移动,工作台移动的最大速度为30mm/s,求:
(1)工作台的脉冲当量;
(2)步进电机的最高工作频率.
(1)工作台的脉冲当量;
(2)步进电机的最高工作频率.
已提交,审核后显示!提交回复
共1条回复
 杰宝宝84 共回答了10个问题
杰宝宝84 共回答了10个问题 |采纳率100%- ①步距角为0.75°可得知电机为 480脉冲/转
②主动齿轮的齿数为24,被动齿轮的齿数为20 可得知传动比i=6:5
③导程为4mm的滚动丝杠,工作台移动的最大速度为30mm/s 可得知负载速度为7.5转/秒
由上可得:
(1) 480脉冲 * 5 对应 6 * 4毫米,100脉冲对应1毫米,所以脉冲当量为100P/mm
(2)由②③得知,负载最大速度为7.5转/秒,对应电机6.25转/秒,所以6.25乘以480=3000脉冲/秒,便是最高工作频率 - 1年前
相关推荐
- 关于步进电机的角加速度和加减速曲线的问题?
关于步进电机的角加速度和加减速曲线的问题?
我需要选择步进电机,现在转动惯量已知,需要角加速度进而求得力矩.假设电机须在100ms左右转20°,角加速度怎么确定?步进电机的角加速度一般都多大?咖啡37度21年前1 -
ljfkid 共回答了18个问题
|采纳率100%如果假定是恒角加速度控制,并且初始角速度为0,设角加速度为α,α=dw/dt,积分得到w=α*t,w=dθ/dt,积分得到α=4000rad·s-2;但是一般步进电机加减速曲线往往是只能从电机测得,步进电机控制本身就是通过驱动控制器对电机输入脉冲信号对电机的每相按一定顺序进行励磁从而进行驱动的,视不同步进产品可能励磁后角加速度都不同,指数算法其实应该更接近实际一些.http://wenku.baidu.com/link?url=2cyy6f4VAVuogaybUD1UijQZxzMJh4oOEwRgbNUs4WPKith_E6E082bmuieAnck5uNBSAr91HzQFJuhhUYl_hO8X8eA86fAhLBR5Wr-WoIK,希望能帮到你一些1年前查看全部
- 电机扭矩计算问题选型手册上110步进电机的扭矩是12N-m,意思是不是在直径一米的时候电机的扭矩12N,那我是用联轴器
电机扭矩计算问题
选型手册上110步进电机的扭矩是12N-m,意思是不是在直径一米的时候电机的扭矩12N,那我是用联轴器 电机轴心对转动轴心.他的扭矩是多少?是这样算吗 :1米=1000毫米、12N乘以1000等于12000N .12000等于1200公斤的力,1200公斤有那么大力吗.正确的算法是怎样的.uu寻你1年前1 -
弦断有谁听07 共回答了15个问题
|采纳率80%你计算的很对,但不能忘记单位的概念,12Nm,是指指此力矩的大小,即你所述,在一米的直径上可以传递12N的力.轴心对轴心也还是该力矩大小不会变.你计算不错,但力矩的单位错了,12N乘1000mm,力矩是:12000Nmm,也就是:12Nm.并不是1200Kg的力.1年前查看全部
- 步进电机跳线是什么意思
lcwlad1年前3
-
精灵E妹 共回答了24个问题
|采纳率91.7%就是把两个点短路连接.一般会跨过一些元器件,这样就使的这些元器件在电路或者系统中不起作用,一般是做调试用,也有做功能切换用的.1年前查看全部
- 步距角为1.2度的步进电机使用这个驱动器,可以设置为2000个脉冲一转吗?
步距角为1.2度的步进电机使用这个驱动器,可以设置为2000个脉冲一转吗?
200
on
on
on
on
400
off
on
on
on
1600
on
off
on
on
3200
off
off
on
on
6400
on
on
off
on
12800
off
on
off
on
25600
on
off
off
on
500
off
off
off
on
1000
on
on
on
off
1200
off
on
on
off
2000
on
off
on
off
4000
off
off
on
off
5000
on
on
off
off
6400
off
on
off
off
8000
on
off
off
off
10000
off
off
off
offsyyey1年前1 -
sdlyt1 共回答了13个问题
|采纳率84.6%应该只可以设定300或300整数倍的脉冲数一转,上面的驱动器只有1200可以选1年前查看全部
- 步进电机能否通过电位器来调节速度(新手请教,)
步进电机能否通过电位器来调节速度(新手请教,)
步进电机能否通过电位器来调节速度.需要什么来达到.我是通过PLC控制步进电机的正反转和步距角,电位器是外部的,来调节它速度(0到最快).如果可以,一个电位器能控制多个步进电机吗?又是如何达到的?
我是一个初学者.能否给我一份更详细的,比如CIN,COUT,Q4~Q14.都代表什么.如果做出来怎么连接都PLC和步进电机进行同步工作.还有一点就是电位器调0能否步进电机转速也0(也就是不转)吗?66277ming1年前1 -
風无痕123 共回答了23个问题
|采纳率95.7%用集成电路4060做一个脉冲电路,由4060的Q4~Q9选一个脉冲频率合适的输出端,做为步进脉冲,由R1调节脉冲频率,由R2决定最高频率,频率高速度就高.由PLC控制步进电机的起,停,正反转,和步距角,4050的图随后发出. 1,关于4060这里有较详细的介绍:http://wenku.baidu.com/view/8668e406eff9aef8941e065a.html2,此电路能输出连续可调的脉冲频率,但不能为0,如想输出为0,可把12脚(RST)接高点平(接VCC)就停振了,可另加开关控制.3,关于与PLC的连接,现代的PLC品种繁多,功能也各不相同,不知你的PLC都有那些功能,是否可接受外来频率信号,你可根据PLC的功能来决定. 1年前查看全部
1年前查看全部

- 电动转盘,带动40公斤的物体转动,要求每秒一转的速度,问需要什么型号的步进电机
电动转盘,带动40公斤的物体转动,要求每秒一转的速度,问需要什么型号的步进电机
用57,2.8NM的电机能否胜任?kkread1年前3 -
jess_fly 共回答了20个问题
|采纳率85%我们是专业制作电动展示转盘的,看到你的问题我感到很疑惑.每秒一转,而且还是带动40公斤的物体转动.这很难以想象.转盘的转速和他的承载力是相互挂钩的.转速越快所对应的载重就会相应递减.按你的要求每秒一转估计你那40公斤的物体放上去没有东西进行固定,一定会因转速太快飞出来砸中人.1年前查看全部
- 英语翻译步进电机是一种将电脉冲信号转换成角位移或者线位置的机电元件,具有易开环控制和无累积误差的优点.但是步进电机在一些
英语翻译
步进电机是一种将电脉冲信号转换成角位移或者线位置的机电元件,具有易开环控制和无累积误差的优点.但是步进电机在一些精度要求高的场合会存在一些低频振荡、高频失步等问题,使步进电机运行很不稳定,因此提出了步进电机的细分驱动控制.
本文介绍了四相反应式步进电机的工作原理,分析了FPGA驱动和单片机驱动器的优缺点,比较了脉宽调制式细分驱动电路和斩波式细分驱动电路原理的优缺点,引出了通过FPGA芯片控制PWM信号的占空比来调整步进电机的各相电流,实现了步进电机的正转和反转,正常运行和细分运行的工作方式.葡萄木乃伊1年前1 -
bendanzwy 共回答了15个问题
|采纳率93.3%人工翻译,请审阅
Stepper motor is an electromechanical component which can convert electric pulse signal into angular displacement or line position,and it has the advantages of easy open-loop control and no cumulative error.However,there are some problems for stepper motor in the applications where high precision is required,such as low-frequency oscillation,high-frequency step-out,etc.,leading to the unstable operation of stepper motor,so the subdivision drive control of stepper motor is proposed.This paper introduces the working principle of four-phase reaction-excited stepper motor,analyzes the advantages and disadvantages of FPGA drive and microcontroller driver,compares the advantages and disadvantages of the principles of PWM subdivision drive circuit and chopper subdivision driver,and proposes using EPGA chip to control the duty cycle of the PWM signal,thereby adjusting the current of each phase of stepper motor.On this basis the forward and reverse rotation,the normal operation and subdivision operation of stepper motor are realized.1年前查看全部
- 步进电机选型,该选用静力矩多大数值的电机?
步进电机选型,该选用静力矩多大数值的电机?
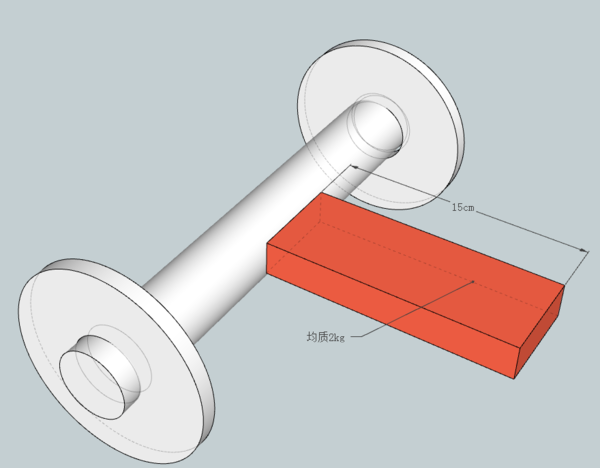
两个轮是轴承,光轴一头接步进电机,负载就是长度15cm的均质材料,重2kg,忽略轴直径宽度的情况下,
请问静力矩该如何计算,结果等于多少呢?要求动作停止的状况下,负载能稳定在相应位置,不打滑.(负载的运动方式就是轴水平放置,类似于钥匙开门的动作带动负载转动)
42的步进电机能行吗?如果不行,能用减速的方式提高静力矩吗?是用同步轮带方式好,还是涡轮蜗杆的方式好? 减速比该怎么计算进去呢?
晓风依依1年前1 -
johnyjg 共回答了20个问题
|采纳率95%对于此类选择电机的问题,我认为主要校核负载的最大力矩,能克服最大力矩,电机就可以转动起来.本问题中已知,负载为一匀质材料,那就可以认为其重在物体1/2处.物体在回转到在水平位置时力矩为最大.套用公式:T(N^m)=mg*R(式中:m-物体质量(kg),g-重力加速度(m/s^2),R-物体回转半径(m) .所以:T=2*9.8*0.15/2=1.47(N*m) 因此:42步进电机输出力矩0.4N*m1年前查看全部
- 我要负载100NM的物体该和多大的步进电机
我要负载100NM的物体该和多大的步进电机
假设滚珠丝杆长度50CM,直径20CM,螺距5CM,步进电机转速120转/分,电机是平行运动的,摩擦系数我不知道,请问我该用多大的步进电机,清晨的小鸟1年前1 -
lan718 共回答了23个问题
|采纳率82.6%电机转一圈,丝杆螺母运行5毫米所做的功要大于物体运动5毫数所做的功.这样你就能估算到马达最小输出扭矩,再放大两到3倍,在实际运用中就差不多了.1年前查看全部
- 步进电机几拍为一步如:AB组--BC组--CD组--DA组 这为一步 还是AB就为一步假设步进电机步进角为7.5度 现要
步进电机几拍为一步
如:AB组--BC组--CD组--DA组 这为一步 还是AB就为一步
假设步进电机步进角为7.5度 现要转一圈
是不是可以理解为 如果为四相双四拍的话 需要144个脉冲(144步 这里说成是144步可以吗 步和脉冲是相同的定义吗)
那么一个脉冲是不是 AB-BC-CD-DA-AB呢
其中AB就为一拍吧?mmhong85201年前1 -
酥心 共回答了17个问题
|采纳率88.2%步进电机一个脉冲就转一个角度,按照你的电机的基本步距角是7.5的话,你 AB-BC-CD-DA-AB就是二相激励,已经转过了5个步距角了.1年前查看全部
- 线切割步进电机单板机四毫米一圈怎么单板机两毫米就走一圈
线切割步进电机单板机四毫米一圈怎么单板机两毫米就走一圈
而且每次都不舍步,步进电机线接错呢?是哪个和哪个接错呢?用颜色线帮忙说明下.敏巫1年前1 -
bing2009 共回答了13个问题
|采纳率84.6%应该是你电机控制器的细分与原来不同了,因为你说的不舍步应该是没有丢步,而且是走多了.估计细分比原来低了一倍,造成原来发100个脉冲1mm现在100个脉冲2mm了1年前查看全部
- 我现在做的工作是用步进电机控制一个转轴(圆柱形)转动.转轴的质量为M,直径为D,同轴转动应该怎么选步进电
幽灵star1年前1
-
allyyangally 共回答了21个问题
|采纳率85.7%所需要的转矩(负荷转矩+电机本身的转矩),--->电机最小需要的转矩
你控制的精度,--->步距角1年前查看全部
- 步进电机和交流伺服电机有什么区别?
步进电机和交流伺服电机有什么区别?
本人不太懂电机,谁能用比较直观形象的语言描述一下,尽量说的详细一些,viviyan1年前1 -
zlt1374 共回答了14个问题
|采纳率92.9%现在常用的交流伺服电机有两种.三相异步伺服电机,和三相永磁同步伺服电机.后者与步进电机有诸多相同之处.我们就用它们做比较吧.步进电机工作时.可以听到.嗒嗒..的声音.电机转子一顿一顿的.就象秒针转动一样.所以叫它步进电机.一般步进电机定子有三个绕组.A,B,C,.环形分配器经功率放大后.按顺分别给绕组通电.磁通就会吸引转子跟着转动.就象彩灯一样.给一串圈成圆圈的小灯依次通电,就会看到一个转到的圈圈啦.速度慢时.你就会看到一个灯接一个灯的亮.一顿一顿的.这就是步进.三相同步服伺服电机.一般用三相变频器驱动.变频器输出三相正弦波同时给电机三个绕组通电,产生一个近似于圆形的旋转磁场,吸引转子均速转动.这是它们最主要的区别.如果给三相同步伺服电机接上步进电源.它也可以步进转动.但是电机的转矩,功率,效率.都很低.很少采用的.篇幅有限.水平有限.就说这么多啦!1年前查看全部
- 求一台步进电机,要求能承载100KG物体以0.1米每秒的速度提升.
755792741年前1
-
yajuan 共回答了23个问题
|采纳率100%选用8N.m的步进电机(实际运用建议使用10N.m),速度设定在120转/分钟,配1:16的减速牙箱,连接直径0.25m的钢丝轮,可将100KG的物体以每秒0.1米的速度提升.1年前查看全部
- 步进电机的转角转速旋转方向分别与什么有关?
suoluosi8881年前1
-
happyfly_23 共回答了11个问题
|采纳率90.9%步进电机的转角转速旋转方向分别与输入脉冲的个数、频率、通电顺序等因素有关.
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件.在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为步距角,它的旋转是以固定的角度一步一步运行的.可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的.1年前查看全部
- 一采用三相六拍驱动方式的步进电机,其转子有80个齿,经丝杆螺母副驱动工作台作直线运动,丝赶的导程为5mm,工作台的最大速
一采用三相六拍驱动方式的步进电机,其转子有80个齿,经丝杆螺母副驱动工作台作直线运动,丝赶的导程为5mm,工作台的最大速度为30mm/s!求步距角、脉冲当量、步进电机的最高频率!北极小熊熊1年前1
-
熊宝拉 共回答了24个问题
|采纳率91.7%参数不太全啊!1年前查看全部
- 步进电机分哪几种及种类
womendejiabb1年前1
-
smth_SCV 共回答了16个问题
|采纳率81.3%且话阄?.5度 或15度; 反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大.在欧美等发达国家80年代已被淘汰; 混合式步进是指混合了永磁式和反应式的优点.它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度.这种步进电机的应用最为广泛.1年前查看全部
- 步进电机的轴与电位器连接,步进电机转动的角度及位置通过电位器反映出来,请问谁有类似的方案?
w2512145451年前1
-
108677449 共回答了10个问题
|采纳率80%你的问题实际上是要用电位器作角度传感器
如果你是需测连续旋转的电机,就必须选择无止档位的电位器 如DJ36W之类
但要注意,此类电位器的机械转角虽能满足360度循环,但电气转角会有10-20度的死角,这是电位器的结构决定的1年前查看全部
- 请问 28BYJ-48 步进电机转角怎么算,我写了个程序让其转了 100个八拍(A-AB-B-BC-C-CD-D-DA)
请问 28BYJ-48 步进电机转角怎么算,我写了个程序让其转了 100个八拍(A-AB-B-BC-C-CD-D-DA),实测大约
70度左右,怎么算?
我这个是带减速的,减速比好像是164,转了100个完整八拍. wo2962828921年前1
wo2962828921年前1 -
rickie09 共回答了13个问题
|采纳率100%步进电机转角的算法:
为转过的角度 = 步距角 * 你的八拍个数
步距角θ=360度/(转子齿数*运行拍数);
28BYJ-48的步距角是5.625度,转过的角度应该是 5.625 * 你的八拍个数,我不清楚你的100个八拍是不是说 100个 一小拍,也就是12个完整的八拍.
如果是12个完整的八拍的话,那转过的角度就是 = 步距角*你的八拍个数 = 5.625* 12 = 67.5度.再算上另外4小拍的转齿角度,大概就是在70度左右.1年前查看全部
- 2/4相 6线的步进电机怎么接?
2/4相 6线的步进电机怎么接?
买了步进电机 但没买配套的驱动器 想直接接单片机
步进电机有六根接线 黄 红 橙 黑 红 蓝
有下面几个问题
1、额定电压是12V,12V接哪根?
2、单片机的输出分别接在哪几根线上?是不接黄橙黑蓝,如果要让其转动的话单片机就输出1000、0100、0010、0001、1000?hifh1年前1 -
beilm 共回答了13个问题
|采纳率84.6%要点一:查找公共端.六线之中有两个是com端,公共端就是接12V的.
查找方法:a.万用表测量之间有阻值的两个引线,记住阻值,如R1.然后使其中一个与万用表固定,另一个标记一下.b.用表的另一表笔,测量其他引线,若有阻值就标记下来,也记住阻值为R2.c.若 R1=R2,则刚才固定的为公共端.若R1=2*R2,最后标记的为公共端.若R2=2*R1,第一次标记的为公共端. d. 这样就查找出来公共端,也找出了其中一相的三根引线.以同样的方法找出另外的一个公共端.
要点二:确定线序.(不考虑公共端,本测试不用它)
确定线序比较复杂,必须在查找出公共端的前提下进行(主要是因为此时已知道各相的各条引线).
第一:在步进电机轴上,套个长条状的硬纸片.起到放大微动作用.
第二:给其中一相点触发的方式通电,步进电机会转一步,非常小.电流方向记作A->B
第三:给另一相通电,也是点触发.观察其转动的方向.假如为方向XX.电流方向记作C->D
第四:给第二步中的那相线通电,先按照原来的通电顺序A->B.若方向与XX相反.
…………………………………………今天没时间就不详说了…………………………………………
给你说个简单的.
直接去试,把驱动器连上,连到步进电机的两相上面的两端,(即不慌用公共端).各相的两端分别交叉放.比如A,B和C,D分别为两相的各端子.就按ACBD顺序放.单片机还是按照1000、0100、0010、0001、1000发送脉冲.
然后,上电若电机转了就成了.若不转,把C和D的位置调换一下就成了.
That‘s over!1年前查看全部
- 步进电机启动频率120PPS,与赫兹怎么换算
破红1年前1
-
mmman 共回答了16个问题
|采纳率87.5%★ PPS 是pulse per second 的简写,即每秒的脉冲数,
所以pps=Hz .不用换算.1年前查看全部
- 步进电机选型时,如何求角加速度?熟悉步进电机和数控的朋友!
步进电机选型时,如何求角加速度?熟悉步进电机和数控的朋友!
我假设的是正弦,可是t=0时,角加速度算出来实在大的惊人啊,导致扭矩太大,貌似步进电机满足不了hero_zzm1年前1 -
woshi小魔女 共回答了17个问题
|采纳率100%什么都有个极限.你那样算肯定不行了.再说步进电机的角速度不是线性的,走一步停一下,通常停的时间短了,就看似连续了,速度是累积平均的结果.算加速度也是用平均值算.算其中一步的角加速度,通常没有意义的.若真要算,还真的不好弄.因为这要看它的步进角了,再说电机的最高转速也是根据型号和性能是不同的.1年前查看全部
- 步进电机的几项几线是什么意思
川香辣肉包1年前1
-
古小誉 共回答了13个问题
|采纳率92.3%DIR是英文缩写,意思为方向;CP是前进脉冲的英文缩写;FREE是马达自由释放信号;这几个都是控制信号输入端,每一对正负端子内都有光藕,导通有效;AB四个端子接步进电机的两相四根线,AC为交流电源输入端1年前查看全部
- 步进电机转子有86个齿,采用三相三拍通电方式,经联轴器带动丝杠螺母传动副驱动工作台做直线运动,要求工作台的脉冲当量小于0
步进电机转子有86个齿,采用三相三拍通电方式,经联轴器带动丝杠螺母传动副驱动工作台做直线运动,要求工作台的脉冲当量小于0.01mm,步进电机的最高工作频率为20000HZ,
求:1、步进电机的步距角θ?
2、滚珠丝杠导程?wuwei05011年前1 -
chriscf 共回答了10个问题
|采纳率90%三相三拍运行,步进电机一般为三相步进电机,步距角为1.5度.
脉冲当量小于0.01mm,p*n/(360/1.5)1年前查看全部
- 两相四线步进电机每秒最多能转多少步
文雪9101年前1
-
ddttom 共回答了23个问题
|采纳率100%保证扭距的情况下200*200/60=666步,最高可到600*200/60=2000步,不过程序要做加速过程,驱动器要有足够高的电压输入.1年前查看全部
- 一个两相步进电机A相线圈电阻0.754欧姆,B相是0.773欧姆,
tyblog5211年前1
-
wgyo123 共回答了22个问题
|采纳率90.9%应该正常,差0.2Ω,你的电机功率是多少吧.主要看功率.1年前查看全部
- 用行程开关控制步进电机是什么意思?怎么控制?可以看做一般开关控制吗?直接闭合或者断开开关?
我爱吃西瓜991年前1
-
龙翔九洲凤相随 共回答了27个问题
|采纳率85.2%行程开关控制步进电机只能用做位置限制,
步进电机只能用plc或驱动器驱动1年前查看全部
- 步进电机转子的齿距和齿形与定子极弧上的小齿( )
步进电机转子的齿距和齿形与定子极弧上的小齿( )
A.基本相似 B.基本相同 C.完全不同 D.完全相同绝艳峰菲1年前1 -
是青不是清 共回答了25个问题
|采纳率80%d,但加工工艺的原因会产生一定的误差,可以忽略不计1年前查看全部
- 英语翻译一篇关于步进电机的专业英文文献,原文如下:MotoriDriver:Micro-step motor Vexta
英语翻译
一篇关于步进电机的专业英文文献,原文如下:MotoriDriver:Micro-step motor Vexta PV266-01E
with five phases and 500 steps by turn (The motor is
shown in Fig.7).Power driver Vexta DFR1514A
with multi-resolution (Minimum:500 我想知道当中的参数 :500 steps by turnzhycxyzrxsm1年前1 -
暗流 共回答了18个问题
|采纳率94.4%MotoriDriver:Vexta PV266-01E Micro-step电机
与五个阶段和500步轮流(电机
图7所示).Vexta DFR1514A电力驱动
与多分辨率1年前查看全部
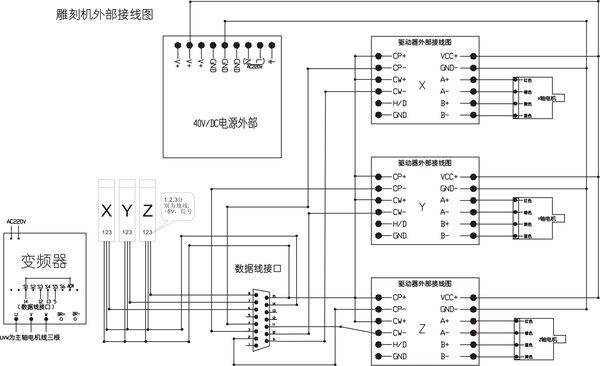
- 如何改变雕刻机步进电机反正转齿条式雕刻机y轴的两个步进电机运转方向要不同,如果同一接线方法肯定是运转方向一样,怎么改变接
如何改变雕刻机步进电机反正转
齿条式雕刻机y轴的两个步进电机运转方向要不同,如果同一接线方法肯定是运转方向一样,怎么改变接线方法,才能两个转动方向相反?我是按照下图接的!
 我明年毕业1年前1
我明年毕业1年前1 -
ff学堂 共回答了15个问题
|采纳率93.3%你的y轴画出的是一个步进电机,如果是两个的话,把另一个电机的红和绿两根线对换一下就行,就是a+接到绿色,a-接到红色,b+还是接黄,b-还是接蓝.
就这样接,没问题,驱动器功率够大就行,不会出任何问题.1年前查看全部
- 请问步进电机额定电流与供电电源的电流关系?
请问步进电机额定电流与供电电源的电流关系?
驱动器的输出电流等于电机额定电流,是否电机在额定电压下,供电电源的电流约等于电机额定电流(不考虑其它电路的功耗),如果电源电压大于电机额定电压,供电电源的电流就会小于电机额定电流,保持功率不变,即I = P/U
我用的两相四线电机,额定电压3.6V,额定电流2.4A,但实际电源(即驱动器的电源)是用18V,为电机额定电压的5倍,是不是电源输出的电流只有电机额定电流的1/5.
另外,驱动器的最大驱动电流要比电机实际使用的电流(额定电流)大多少合适.蓝雪凝1年前1 -
txwsh 共回答了17个问题
|采纳率94.1%步进电机标识的额定电压只在芯片测试时有用,实际使用中取决于驱动器,目前的驱动器都是电流驱动,小型两相步进电机的驱动器工作电压大都在12-40V,保证供应到驱动器的电流即可;两相步进电机驱动器最大驱动电流要等于或大于步进电机的额定电流才能充分发挥电机的性能(达到额定力矩输出),适配的供电电源电流至少选步进电机额定电流的1.2倍为好,这是考虑到两相同时通电和启动的原因.以上多年实践工作中得来,供参考.1年前查看全部
- 步进电机最大力矩6N.m 换算成公斤多少?给个公式 多少公斤是指产生的力能推动多少公斤的物体吗?
dl71771年前1
-
leontaiji 共回答了15个问题
|采纳率93.3%力矩与推动多大的物体没有可比性,6N.M理论上可推动任何重量的物体,甚至火车,只是速度非常慢了.你听说过著名的物理名句吗:“给我一个杠杆,我可以橇动地球”就是一样的道理.1年前查看全部
- 英语翻译步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中.随着微电子和计算机技术的发展,
英语翻译
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中.随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用.
步进电机是一种将电脉冲转化为角位移的执行机构.当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的.可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的.步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制.
普通步进电机驱动都不带细分,如:采用三相六拍、五相十拍等,使用中会出现低速振动现象,造成丢步.
若采用细分驱动,在驱动步进电机的过程中减小步距角,提高步进分辨率,增加平稳性,可有效地解决丢步问题.
步进的速度取决于控制绕组通电和断电的频率,转向取决于定子轮流通电的顺序.用开关管搭起控制电流通断的开关电路,有单片机端口接开关管栅极控制端,从而实现通过单片机对步进电机的控制.具有以下优点:
1.采用高速单片机技术,实现快速反应;
2.全数字控制,功能强大,位置/速度/力矩控制;
3.效率高可以往小型化方向发展;
4.输出电流大,可以满足更多的应用场合.
关键词:步进电机 细分驱动开心开心1年前1 -
热翁 共回答了19个问题
|采纳率94.7%Stepper motors as actuators,electromechanical integration is one of the key products,widely used in a variety of automatic control systems.With the development of microelectronics and computer technology,increasing demand for stepper motors,all applications in all areas of the national economy.
Stepper motor is an electrical pulse into the angular displacement of the implementing agencies.When the stepper driver receives a pulse signal,it drives the direction of stepping motor rotation by setting a fixed point (called "step angle"),its angle of rotation is fixed step by step operation.Pulse number can be controlled by controlling the angular displacement,so as to achieve accurate positioning purposes; also can control the pulse frequency to control motor rotation speed and acceleration,so as to achieve speed control purposes.Stepper motor control can be used as a special motor,its no accumulation of error (accuracy of 100%) is widely used in various open-loop control.
Stepper motor driver is not with ordinary subdivision,such as:use of three-phase six-shot,five-phase 10 film and so on,use low speed vibration phenomena occur,resulting in lost step.
The use of a sub driver,in the process of stepping motor driven reduction step angle,increased step resolution,increase smoothness,which can effectively solve the problem step throw.
The speed of winding step power control and power of the frequency shift depending on the order of the stator power rotation.Put up with the switch control of power flow off the switch circuit,a microcontroller port access switch gate control terminal to realize the single chip microcomputer to control the stepping motor.Has the following advantages:
1.Using high-speed chip technology,fast response;
2.Fully digital control,powerful,position / speed / torque control;
3.Miniaturization and high efficiency can go to the direction of development;
4.Output current to meet more applications.
Keywords:Stepper Moto1年前查看全部
- 通过分析步进电机的工作原理和通电方式,可得出那些结论?
通过分析步进电机的工作原理和通电方式,可得出那些结论?
1、步进电机的角位移与输入电脉冲个数成正比。
2、旋转速度与输入电脉冲的频率成正比。
3、控制脉冲顺序可以改变步进电机的旋转方向。小火龙喷喷1年前1 -
gzvegagz 共回答了14个问题
|采纳率92.9%建议去图书馆查看一下相关书籍,多查阅资料应该是可以找到结论的1年前查看全部
大家在问
- 1(2010•湖南三模)重为500N的物体放在水平地面上,物体与地面的最大静摩擦力是80N,动摩擦因数为0.15,如果分别
- 2若抛物线y=3x²-6x+c的顶点在x轴上请你求出该点坐标并求出c的值
- 3已知函数f(x)=ax^3+bx^2+cx+d的图像如下,求b的取值范围
- 4平面图 立面图 首层平面图 剖面图 总平面图等 英语翻译
- 5如图,在△abc中,∠acb=90°,ad平分∠bac,e,f为边ab,ac上的任意一点,且ae=af,连接ef并延长,
- 6如何在匀速行驶的火车上测量火车的速度?
- 7在毕业联欢会上,请你代表全班同学,表达对老师、学校的惜别之情,把你的发言写下来.
- 8英语选择题解答-----places on the earth where plant and animal life
- 9减去-13x等于5x的2次方-3x-5的多项式为
- 10he is the first man后面为什么是to do sth
- 11查字典填空2.“垂直”中“垂”字用数笔画查字法应查__画.第六画是__,把“垂”字加上一个___偏旁组成另一个字___,
- 12某无色溶液中加入过量盐酸有沉淀产生,过滤后向滤液中加入过量氨水又有沉淀产生,下列溶液中符合此条件的是( )
- 13He survived his wife by 10 years
- 14丙醛有α氢吗?能发生碘仿反应吗
- 15请帮忙解一道化学题,谢谢,实验中需0.1mol/L的Na2CO3溶液950ml,用容量瓶配置时应该称取Na2CO3粉末的