机械手要怎样从一叠纸上面每次只抓一张纸
 风之舞魅2022-10-04 11:39:541条回答
风之舞魅2022-10-04 11:39:541条回答我想用一个机械手,每次从一叠纸上面刚好抓1张纸,纸叠有300mm厚.不知怎样才能做到
已提交,审核后显示!提交回复
共1条回复
 inst008 共回答了14个问题
inst008 共回答了14个问题 |采纳率92.9%- 纸有复印纸哪么厚不?有的话,用真空负压就行.哎,也可以用治具压纸边,再吸应该可行…
- 1年前
相关推荐
- 在一次科技展上,许多人对新疆博州四中学生发明的“蛙泳式沙漠汽车”、“毛发气象仪”、“采绵机械手”等惊叹不已,问他们“是不
在一次科技展上,许多人对新疆博州四中学生发明的“蛙泳式沙漠汽车”、“毛发气象仪”、“采绵机械手”等惊叹不已,问他们“是不是比别人聪明”。他们的回答是一致的,这是参加科技小组的收获,课本教会我们知识,科技实践活动教会我们创新的思维方式,让我们动手制作,有所发现。这个事例告诉我们,学习要 [ ]A.夯实基础,注重积累
B.认真务实,勤于观察
C.触类旁通,善于想像
D.学以致用,勤于实践湘筠1年前1 -
wwn8888 共回答了22个问题
|采纳率95.5%D1年前查看全部
- 英语翻译一般适合于小型,单工程薄钢板及连续模零件之下料、冲孔、折曲、成型工作,可单冲、连续模、机械手连线或加传送系统作业
英语翻译
一般适合于小型,单工程薄钢板及连续模零件之下料、冲孔、折曲、成型工作,可单冲、连续模、机械手连线或加传送系统作业.月影银狼1年前1 -
0王旭东0 共回答了18个问题
|采纳率83.3%General suitable for small scaled, thin steel plate of single engineering and continuous the mold spare parts under anticipate, hurtle the bore, geological fold and model the work, single blunt, consecution mold, the machine hand on-line or add to deliver the system homework.1年前查看全部
- 我要做一个气动机械手的设计,该机械手要能完成升降、旋转、左右移以及抓取工件等动作.
我要做一个气动机械手的设计,该机械手要能完成升降、旋转、左右移以及抓取工件等动作.
要求:
1、气动机械手的行程范围上下为200-1500mm,旋转范围0-270度.
2、气动机械手对零件抓力在15-20kg.
该机械手要能完成升降、旋转、左右移以及抓取工件等动作,所有动作都要求用气缸来完成,具体要求如下,请问气缸怎么选型、装配图怎么来画,尤其是旋转气缸带动旋转台回转部分.cutelilice1年前1 -
开外飞仙 共回答了10个问题
|采纳率100%1、抓手用契形机构,按抓力15-20kg、抓手的抓取工件动作的伸缩范围,倒推计算,经契形机构放大,可求抓取气缸的行程和压强、面积;
2、升降、旋转、左右移的气缸:按支撑的最大重量加安全系数计算压强、面积;按该工作所需行程选气缸的行程.
3、气缸选型:找专业微型气动厂家的资料,设计手册的气缸一般个头太大.
4、装配图:自己画,没有免费的午餐.1年前查看全部
- 请教机械手公式L=(D/2)tgψ
请教机械手公式L=(D/2)tgψ
有哪位高手知道L=(D/2)tgψ这个公式?是计算机械手部活塞杆行程长的公式,我想知道各个符号的意思.请高手赐教.尤其是ψ符号.将会给你1年前1 -
hover151 共回答了28个问题
|采纳率85.7%D 是直径 所以D/2 是半径 w 是 角速度1年前查看全部
- 把一个物体从A点移动到B点用机械手分20步,
把一个物体从A点移动到B点用机械手分20步,
哥们,急用,是PLCapfelblog1年前1 -
blackcollar 共回答了25个问题
|采纳率84%是用PLC控制完成么?是的话我帮你搞定1年前查看全部
- 立式精锻机自动上料机械手怎么翻译
chen924551年前2
-
jinjingccg 共回答了16个问题
|采纳率87.5%Vertical precise forging machine automatic feeding manipulato1年前查看全部
- 类似游戏厅里的机械手抓玩具问题!我有一个袋子,里面放了许多玻璃球.然后我用机械手去抓!假设抓出的个数一共有以下几种情况:
类似游戏厅里的机械手抓玩具问题!我有一个袋子,里面放了许多玻璃球.然后我用机械手去抓!假设抓出的个数一共有以下几种情况:抓到:0个,1个,2个,3个,4个,5个,6个,7个.
我用3种不同的机械手去抓(机械手大小和材料略有不同)!假设为A,B,C三种型号的机械手.每种机械手都抓取若干次!最后得出概率!
A种型号机械手对应的玻璃球个数概率为:0个:8%,1个:12%,2个:18%,3个:20%,4个:20%,5个:10%,6个:7%,7个:5%
B,C种型号的概率略有不同!现在我就想知道我每种型号的机械手的平均抓取个数是多少啊?就像A种的平均抓取个数是多少啊?是2.xx 还是3.我要精确度小数点后2位!kingstone09021年前1 -
弥勒笑 共回答了18个问题
|采纳率83.3%求离散型随机变量X的期望
i=0,1,2,3,4,5,6,7
即EX=求和 i*P(X=i)
=求和 i*抓到i的概率
=0*0.08+1*0.12+2*0.18+3*0.2+4*0.2+5*0.1+6*0.07+7*0.05
=3.15个/每次1年前查看全部
- 机械手划火车的相对论习题典型例题,大致描述如下:一列高速火车以速度u驶过车站时,固定在站台上的相距1m的两只机械手在车厢
机械手划火车的相对论习题
典型例题,大致描述如下:
一列高速火车以速度u驶过车站时,固定在站台上的相距1m的两只机械手在车厢上同
时划出两个痕迹,则车厢上的观察者应测出这两个痕迹之间的距离为
人在车厢上观察到痕迹长度,应为人在车厢上看见的机械手的间距.该间距为长度收缩后的,即间距为γ(注意:γ (gamma) 是书中恒等式规定的值哦).
但是由于在车厢上观察会发现两机械手划火车的时间间隔不为0.也就是说当一只机械手划出痕迹后,需要一段时间后,另一支才划出痕迹.此时火车不就向前运动了吗(实际上,对于车厢中的人来说,应该是机械手向后运动了)?我认为此题答案是 Δs+U*Δt
其中U是两参考系(站台、车厢)相对速度,Δt是车厢中观察,机械手划火车的时间间隔,Δs=γ
为什么是加号呢?
现规定火车运动方向为正,较近一个机械手是指从该机械手出发,沿正方向走,会经过另一机械手.
相对的,另一只是较远一个机械手.
由于Δs=γ>0,也就是说计算机械手相对位置时,是较远一个机械手在参考系中坐标 x1 减去较近一个机械手对参考系中坐标 x2 得到的(x1-x2>0 x2-x1梦影清香1年前1 -
leonating 共回答了22个问题
|采纳率90.9%这个答案明显是错的.
同时的相对性这是最起码的.
两只机械手在车厢系是不同时划痕的.
这题计算起来也很简单.
洛伦兹变换,X‘=γ(x-vt).
两事件间隔1m,同时发生.就是xa-xb=1m,ta-tb=0.
X’a-X‘b=γ((xa-xb)-v(ta-tb))=γm
γ>1,我怀疑你错在这里.
你的具体分析的方法当然也是可行的.
在车厢中,有洛伦兹变换t′=γ(t-vx/(c*c)),容易知道朝向速度方向的划痕先发生.后面的后发生.
Δs+U*Δt是没错的.
其中Δs=1m/γ,Δt=γ(Δt-UΔx/(c*c))=γU/(c*c)*1m,
Δs+U*Δt
=1m/γ+γU*U/(c*c)*1m 代入γ=(1-U2/c2)^-1/2
=γm1年前查看全部
- 机械设计基础(第五版) 第一章习题1-12 图为机械手的那个题怎么做啊?n=?向各位大侠求教
Jerry40961年前1
-
lhh129 共回答了21个问题
|采纳率90.5%F=3n-2Pl-Ph
=3*3-2*3
=31年前查看全部
- 电子电路是怎么控制机械装置的,比如说机械手,凭什么一些代码和电路就能控制机械装置的运动,也就是说电路和机械装置之间是靠什
电子电路是怎么控制机械装置的,比如说机械手,凭什么一些代码和电路就能控制机械装置的运动,也就是说电路和机械装置之间是靠什么驱动的?滨情1年前6
-
新河大队 共回答了1个问题
|采纳率100%这不属于小学内容吧,他们都是靠代码执行命令的1年前查看全部
- 轮胎机械手怎么翻译
4and61年前3
-
sugar1185 共回答了9个问题
|采纳率77.8%tyre/tire(2选1,下同) manipulator
tyre/tire mechanical arm
tyre/tire transfer arm
tyre/tire mechanical hand
供参1年前查看全部
- 哪里有玻璃厂使用的搬运机械手?最大码垛能力能承受多少?
skpjsh1年前1
-
anna君 共回答了15个问题
|采纳率86.7%答:0石3家1庄1金8泰6福1特2就7有3该8产9品,不仅码垛速度快,而且承受能力达,最大可以达到 10次/分 .1年前查看全部
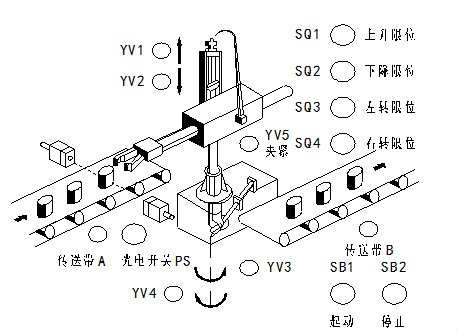
- plc 机械手用PLC构成机械手控制系统。1.控制要求按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。下
plc 机械手
用PLC构成机械手控制系统。
1.控制要求
按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。下降到位后机械手夹紧物体,2s后开始上升,而机械手保持夹紧。上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。上升到位后,传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才完成一次循环。
2.I/O分配
3.按图所示的梯形图输入程序。
4.调试并运行程序。
sammy2141年前1 -
山地大毒 共回答了20个问题
|采纳率95%这种很简单啦,我们生产的机床上下料都是自己用plc写的控制系统,我私信你了1年前查看全部
- 如图,机械手要将一个工件从图中A处移动到B处,但是这个工件不能碰到图中的障碍(不包括坐标轴),试用坐标写出一条机械手在移
如图,机械手要将一个工件从图中A处移动到B处,但是这个工件不能碰到图中的障碍(不包括坐标轴),试用坐标写出一条机械手在移动中可能走的路程. 主要是为什么 求为什么
 zjm8001年前1
zjm8001年前1 -
19931029 共回答了21个问题
|采纳率90.5%(-4.-2)(-5,-2)(-6,-2)(-7,-2)(-7,-1)(-7,0)(-7,1)(-7,2)(-7,3)(-7,4)(-7,5)(-7,6)(-7,7)(-6,7)(-5,7)(-4,7)(-3,7)(-3,6)(-3,5)(-3,4)1年前查看全部
- ABB机械手命令语句,不太明白,
ABB机械手命令语句,不太明白,
VelSet 50,800;
MoveL p1,v1000,z10,tool1;
MoveL p2,v2000,z10,tool1;
MoveL p3,v1000/T:5,z10,tool1;酷有什么用1年前1 -
peace1973 共回答了11个问题
|采纳率72.7%VelSet 50,800; ---把机器人的运动速度设置为编程速度的50%,最大TCP速度800mm/s;
MoveL p1,v1000,z10,tool1;---tool1从当前点运动到P1点,速度V1000*50%=V500;
MoveL p2,v2000,z10,tool1; ---tool1从P1点运动到P2点,速度V2000*50%=V1000,但是超过了最大速度800的限制,所以速度是V800;
MoveL p3,v1000/T:5,z10,tool1;---tool1从P2点运动到P3点,以时间代替速度,这里是5S,但是上面限定了一半的编程速度,所以这儿应该是从P2运动到P3点,时间10S.1年前查看全部
- 我设计了一个桁架机械手 但是桁架部分不会算了
我设计了一个桁架机械手 但是桁架部分不会算了
桁架大致如图那个形状 两个立柱支撑一个机械手的移动轨道 那个轨道可以视为一个长方体 两个立柱的受力都是垂直向下的 如何根据受力确定立柱的横截面尺寸参数(立柱高度确定)?立柱可以是空心的 也可以是实心的 截面形状可圆可方 只要能够承受住对它向下的压力就好 涉及到的参数用个字母表示就好(我学过的理论力学和材料力学主要都是平面的 所以这个不太懂) xgb2225551年前0
xgb2225551年前0 -
共回答了个问题
|采纳率
- 自由度的概念?机械中的.给我解释一下机械中的自由度的概念,怎么求一个机械手的自由度?用三个球面副连接起来(每个球面副作为
自由度的概念?机械中的.
给我解释一下机械中的自由度的概念,怎么求一个机械手的自由度?
用三个球面副连接起来(每个球面副作为一个支点)的两个运动构件的自由度是多少?泪影倾城1年前1 -
娜鹰 共回答了9个问题
|采纳率88.9%没有看到图,无法分析.
自由度有计算公式的.请参考《机械原理》.1年前查看全部
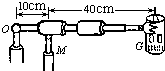
- 如图所示为一装配线上的一个“机械手”,其O点为固定转动轴.现在它水平抓住一只重40N的工件G,则动力机械M至少要施加__
如图所示为一装配线上的一个“机械手”,其O点为固定转动轴.现在它水平抓住一只重40N的工件G,则动力机械M至少要施加______N的推力;若它在0.5s内匀速将这一工件提升了20cm,而M的功率为20W,则机械手做的功为______J,机械效率为______.
 jake_d1年前0
jake_d1年前0 -
共回答了个问题
|采纳率
- 研究机械手的目的及意义
luo__fang1年前1
-
hpchpc 共回答了22个问题
|采纳率86.4%目的:为了代替人类在某些苛刻的场合从事生产,或用于流水作业,以机械手往复的工作,节约人的体力.
意义:由于机械手在生活中的大量运用,使得人类的生产率有了大幅的提高,同时也改善了我们的工作环境.让人类的生活变得越来越智能化.1年前查看全部
- “玉兔号”采集到一块不规则的月球矿石,为了测量出它的密度,地面控制中心通过遥控方式指挥月球车的机械手,完成了以下操作:
 “玉兔号”采集到一块不规则的月球矿石,为了测量出它的密度,地面控制中心通过遥控方式指挥月球车的机械手,完成了以下操作:
“玉兔号”采集到一块不规则的月球矿石,为了测量出它的密度,地面控制中心通过遥控方式指挥月球车的机械手,完成了以下操作:
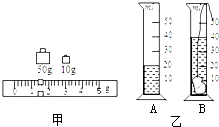
(1)用调好的天平称量矿石的质量图(甲)所示,矿石的质量是______g;
(2)由于月球表面无水,科研人员采用排沙测量矿石的体积,图乙展示了体积测量过程中的两个画面,合理顺序为______(选填“AB”或“BA”);矿石的体积为______cm3.
(3)由此可知矿石的密度为______kg/m3.
后来科研人员又通过分子扫描及光谱分析技术,发现它和地球上的一种矿石结构完全相同,但其实际密度比这次测量密度略大,造成这种结果的原因是______.ngdesing1年前1 -
young一代 共回答了22个问题
|采纳率90.9%解题思路:(1)根据天平的读数方法,物体的质量等于砝码的质量加上游码所对刻度,而要准确读出游码所对刻度,必须明确标尺的分度值及以游码左端所对刻度为准.如图本标尺的分度值是0.2g.
(2)读出量筒中水的体积、水和矿石的体积,计算出矿石的体积.
(3)根据ρ=[m/V]计算出矿石的密度.
(4)因为矿石和沙子之间有空隙,因此排沙法使体积测量偏大,再根据ρ=[m/V]分析密度偏大还是偏小.(1)根据天平的读数方法,如图本天平的分度值是0.2g,所以m矿=游码质量+游码对应刻度值=50g+10g+1.4g=61.4g;
(2)由于月球表面无水,科研人员采用排沙测量矿石的体积,因此合理顺序应为先将沙子和矿石装在量筒中,读出示数,然后取出矿石,再读数,因此合理的顺序应该是BA,
根据量筒的读数方法,视线与凹面底部平行,沙的体积V1=20ml,矿石和沙的总体积V2=40ml,
∴V矿=V2-V1=40ml-20ml=20ml=20cm3
(3)根据密度公式ρ=[m/V],已知矿石质量m矿=61.4g,矿石体积V矿=20cm3,
∴ρ矿=
m矿
V矿=[61.4g
20cm3=3.07g∕cm3=3.07×103kg∕m3.
(4)因为矿石和沙子之间有空隙,因此排沙法使体积测量偏大,由ρ=
m/V]可知,这次测量密度偏小.
故答案为:(1)61.4;(2)BA;20;(3)3.07×103;(4)排沙法使体积测量偏大.点评:
本题考点: 固体的密度测量实验.
考点点评: 本题考查了固体密度的测量方法,涉及到量筒和天平的使用,属于重要实验题目,特别要注意:排沙测量矿石的体积和排水法测量矿石体积的不同点.1年前查看全部
- 如图所示为一装配线上的一个“机械手”,其O点为固定转动轴.现在它水平抓住一只重40N的工件G,则动力机械M至少要施加__
如图所示为一装配线上的一个“机械手”,其O点为固定转动轴.现在它水平抓住一只重40N的工件G,则动力机械M至少要施加______N的推力;若它在0.5s内匀速将这一工件提升了20cm,而M的功率为20W,则机械手做的功为______J,机械效率为______. squirrel_leopard1年前0
-
共回答了个问题
|采纳率
- 英语翻译本部分以图一所示机械手为例,该机械手的主要功能工件从位置A抓取并送到位置B.图2是机械手工作位置示意图.图3是图
英语翻译
本部分以图一所示机械手为例,该机械手的主要功能工件从位置A抓取并送到位置B.图2是机械手工作位置示意图.
图3是图一所示机械手的机构运动简图.此节以该机械手为研究对象,设计为气动驱动机械手.根据其抓物取料时简图,其工作原理如下:工件的补充使用人工控制,亦即可直接将工件放在机械手爪下方,机械手爪动作;只要手爪下方一有工件,气缸1带动大机械手臂使机械手爪下降,气缸2配合大臂带动小机械臂工作,将工件抓取后上升到一定高度停滞,然后底座由底部齿轮带动,旋转90度,将它搬运到规定地点的上方,随后通过两气缸配合,再次带动机械手臂下降后放开工件,机械手臂上升,底座回旋90度复位.
鉴于本文只研究机械手底座与大小臂之间的配合,因此为了简化分析模型,在模型中删除了齿轮与轴之间的键、起支撑作用的肋板以及其他冗余的结构,并用ADAMS的布尔运算功能将机械手爪的所有零件固连,及其他有相近作用的部分分别合为一体.完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束.完成约束添加并选择选择各部分颜色后的模型如图4 所示.力福1年前2 -
ds65388851 共回答了21个问题
|采纳率90.5%The manipulator shown in the figure is the example of this section.the primary function of the manipulator is to grab a part and transfer it from position a to position b.Figure 2 is a diagram
to show the manipulator working position.
The kinematic diagram of the manipulator mechanismAs is shown in Figure 3.This section will focus on the study of the manipulator and design pneumatic powered manipulator.According
to the sketch of its grasp when taking the material,its working principles are as follows:the supplementary use of manual control,that
is directly below the workpiece in a manipulator claw,manipulator claw
action;As long as hand claw below a has workpiece,
cylinder 1 led large manipulator arm makes manipulator claw declined,
cylinder 2 tie large arm led small machinery arm work,will workpiece
grab Hou rose to must height stagnation,then base by bottom gear led,
rotating 90 degrees,will it handling to provides locations of above,
then through two cylinder tie,again led machinery arm declined Hou
release workpiece,machinery arm rose,base swing 90 degrees reset.
In view of this article only matching research robot base with size
between arm,in order to simplify the analysis model in the model
between gears and shaft key is removed,the supporting role of rib and
other redundant structures,Boolean operation function manipulator claw
and ADAMS all parts of solid companies,and other similar parts for one
of the roles.After completing the simplified,in order
to form an organic whole the relative motion of the parts,according to
the relative motion between components,used in the model constraints in the ADAMS/View tool for individual members to introduce constraints.After you complete the constraint and select the components of the selected color model as shown in Figure 4.1年前查看全部
- 一航天飞机绕地球作匀速圆周运动,航在飞机内一机械手将物体相对航天飞机无初速地释放于机外,则此物体将( )
一航天飞机绕地球作匀速圆周运动,航在飞机内一机械手将物体相对航天飞机无初速地释放于机外,则此物体将( )
A. 自由落体运动
B. 做平抛运动
C. 远离地球运动
D. 与航天飞机相对距离保持不变kristol1年前1 -
fhy9169 共回答了13个问题
|采纳率100%解题思路:将物体相对航天飞机由静止释放时,仍由地球的万有引力提供向心力,即可分析物体的运动情况.航天飞机在太空绕地球作匀速圆周运动时,由地球的万有引力提供向心力,由牛顿第二定律得到航天飞机的速度表达式为v=
GM
r,M是地球的质量,r是航天飞机的轨道半径.将物体相对航天飞机静止释放时,卫星的速度也等于v=
GM
r,地球对物体万有引力恰好提供其向心力,所以物体将随航天飞机同步绕地球作匀速圆周运动,与航天飞机的相对距离保持不变.故D正确,A、B、C错误.
故选:D.点评:
本题考点: 万有引力定律及其应用.
考点点评: 本题关键要理解卫星做匀速圆周运动的条件;地球对物体的万有引力提供向心力.1年前查看全部
大家在问
- 1共北小学历史要好的啊,不好不给分10年前的校长
- 2吹面不寒杨柳风,这句话中的杨柳风指什么?表明了什么?
- 3风雨xx 成语
- 4分别以锐角三角形的边AB,BC,CA为斜边向外作等腰RT三角形DAB,EBC,FAC
- 5有理数实数素数是什么意思!
- 6桂花雨的中心思想句
- 7常温下Na2CO3和NaHCO3均为0.1mol/L的混合溶液,在该溶液中滴加稀盐酸至中性时,溶液中溶质的主要成分是?
- 8一种压路机滚筒,直径是1.2米,长3米,每分钟转10周,每分钟压路多少平方米?
- 9C为线段AB上一点,三角形ACM和三角形CBN是等边三角形,AN交CM与点E,BM交CN与点F,求证:CE=CF
- 10词中有两个意思相近的四字词语?
- 11表达某处有某物用哪个句型【英语】
- 12初中的学习生活,就像一杯绿茶,越品越有味,我们面临竞争与合作,压力与喜悦,尽在其中。为此,面对学习压力就要有一个良好的心
- 13I have toomuch homework to do this weekend (改同义句)
- 14“我的脑海里浮现出一个小男孩”翻译成英文
- 15mRNA长度怎么比cDNA短这是在NCBI查的人ifn-beta基因(表达一种干扰素的一个基因),显示是说是mRNA序列